बुनियादी तकनीकी डेटारेडियो नियंत्रण प्रणाली आपको 10 मीटर तक की दूरी पर खिलौने को दूर से नियंत्रित करने की अनुमति देती है।
ट्रांसमीटर की ऑपरेटिंग आवृत्ति 27.12 मेगाहर्ट्ज है।
ट्रांसमीटर की शक्ति 4-10 मेगावाट के भीतर है।
ट्रांसमीटर की वर्तमान खपत 20 mA से अधिक नहीं है।
एंटीना और बिजली आपूर्ति के साथ ट्रांसमीटर का वजन 150 ग्राम से अधिक नहीं है।
ऑपरेटिंग फ़्रीक्वेंसी बैंड में रिसीवर की संवेदनशीलता 100 μV से अधिक खराब नहीं है।
रिसीवर की वर्तमान खपत 20 mA से अधिक नहीं है।
रिसीवर का वजन 70 ग्राम से अधिक नहीं है।
कमांड डिवाइस चार अलग-अलग कमांड का निष्पादन प्रदान करता है, जिन्हें समय-समय पर दोहराया जाता है।
कमांड डिवाइस का वजन 70 ग्राम से अधिक नहीं है।
रिसीवर और ट्रांसमीटर क्रोना-वीटीएस बैटरी द्वारा संचालित होते हैं। संचालन का सिद्धांतट्रांसमीटर में एक मॉड्यूलेटर और एक उच्च आवृत्ति जनरेटर होता है (चित्र 1)। ट्रांसमीटर मॉड्यूलेटर एक सममित मल्टीवाइब्रेटर है जो MP40 प्रकार के कम-आवृत्ति ट्रांजिस्टर VT2 और VT3 पर इकट्ठा होता है।
चित्र.1 उच्च-आवृत्ति जनरेटर को कैपेसिटिव फीडबैक सर्किट के अनुसार ट्रांजिस्टर VT1 प्रकार P416 पर इकट्ठा किया गया है। जब VT2 मॉड्यूलेटर ट्रांजिस्टर खुला होता है, तो जनरेटर सर्किट बैटरी के सकारात्मक के करीब बंद हो जाता है, जनरेटर ऑपरेटिंग आवृत्ति पर उत्तेजित होता है, एंटीना द्वारा एक उच्च आवृत्ति संकेत उत्सर्जित होता है। रिसीवर में एक उच्च आवृत्ति चरण, एक कम आवृत्ति एम्पलीफायर और एक इलेक्ट्रॉनिक रिले होता है। रिसीवर का उच्च-आवृत्ति कैस्केड एक सुपर-रीजेनरेटर है। सुपर-रीजेनरेटर को P416 प्रकार के उच्च-आवृत्ति ट्रांजिस्टर VT1 पर इकट्ठा किया गया है (चित्र 2)। 
चित्र.2 उत्सर्जक श्रृंखला C5 R3 पर सिग्नल की अनुपस्थिति में, शमन आवृत्ति में दोलन देखे जाते हैं। भिगोना आवृत्ति अपने ऑपरेटिंग आवृत्ति पर सुपर-रीजेनरेटर की संवेदनशीलता निर्धारित करती है और तत्वों C5, R3 द्वारा चुनी जाती है। ट्रांसमीटर का कमांड सिग्नल L1-C4 सर्किट द्वारा चुना जाता है, सुपर-रीजेनरेटर द्वारा प्रवर्धित और पता लगाया जाता है। R4-C8 फ़िल्टर उच्च-क्रम डंपिंग आवृत्ति को अलग करते हुए, कम-आवृत्ति कमांड सिग्नल को VT2 एम्पलीफायर के इनपुट में भेजता है। इलेक्ट्रॉनिक रिले को MP40 प्रकार के ट्रांजिस्टर VT3-VT4 पर इकट्ठा किया जाता है, और VT4 ट्रांजिस्टर का कलेक्टर PCM-1 प्रकार के कार्यकारी रिले KR से जुड़ा होता है। कमांड सिग्नल की कम-आवृत्ति वोल्टेज को ट्रांजिस्टर VT3-VT4 द्वारा प्रवर्धित किया जाता है और कैपेसिटर C13 के माध्यम से रेक्टिफायर सेल UD1, UDZ को खिलाया जाता है। रोकनेवाला R9 के माध्यम से सुधारित वोल्टेज को ट्रांजिस्टर VT3 के आधार पर आपूर्ति की जाती है। इस स्थिति में, ट्रांजिस्टर VT3 का उत्सर्जक धारा तेजी से बढ़ जाती है, ट्रांजिस्टर VT4 खुल जाता है। रिले सक्रिय हो जाता है, जिससे कमांड डिवाइस मोटर का बिजली आपूर्ति सर्किट बंद हो जाता है। कमांड डिवाइस में एक इलेक्ट्रिक मोटर, एक रैचेट मैकेनिज्म, एक प्रोग्राम डिस्क और वितरणात्मक स्लाइडिंग संपर्क होते हैं। प्रोग्राम डिस्क, जिसके किनारे जंपर्स की एक प्रणाली है, वितरण स्लाइडिंग संपर्कों के माध्यम से ड्राइव मोटर्स और खिलौने के अन्य विद्युत तत्वों की बिजली आपूर्ति को स्विच करती है। रेडियो-नियंत्रित खिलौने के विद्युत सर्किट का विवरणआरेख (चित्र 3) रेडियो-नियंत्रित खिलौने के विद्युत उपकरण के विकल्पों में से एक को दर्शाता है। खिलौने में दो ड्राइव मोटर हैं जो आगे की गति प्रदान करती हैं और बाएँ और दाएँ मुड़ती हैं। खिलौने के पीछे के लाइट बल्ब टर्न सिग्नल के रूप में काम करते हैं। दो हेडलाइट्स खिलौने के पथ को रोशन करने का प्रभाव पैदा करती हैं। 
चित्र 3. ट्रांसमीटर से कमांड सिग्नल प्राप्त करने के लिए, एक रिसीवर और एक कमांड उपकरण खिलौने में बनाया गया है। ड्राइव का इंजन और कमांड डिवाइस, साथ ही लाइट बल्ब, 3336L (U) (GB1) प्रकार की दो श्रृंखला-कनेक्टेड बैटरियों द्वारा संचालित होते हैं। रिसीवर क्रोना-वीटीएस बैटरी (जीबी2) द्वारा संचालित है। बैटरी को बंद करने के लिए, दो-पोल स्विच एस का उपयोग किया जाता है। जब ट्रांसमीटर से एक कमांड सिग्नल प्राप्त होता है, तो रिले केआर, रिसीवर सक्रिय हो जाता है और, अपने संपर्कों के साथ, कमांड डिवाइस की इलेक्ट्रिक मोटर को चालू कर देता है (चित्र) . 4) एमजेड. 
चित्र.4. कमांड डिवाइस इलेक्ट्रिक मोटर एमजेड एक शाफ़्ट तंत्र की मदद से प्रोग्राम डिस्क को 30 डिग्री तक घुमाता है, जो एक कमांड को स्विच करने के अनुरूप होता है। प्रोग्राम डिस्क, स्लाइडिंग संपर्कों को वितरित करके, ड्राइव के इलेक्ट्रिक मोटर और खिलौने के प्रकाश बल्बों को निम्नानुसार चालू करती है: "आगे" स्थिति में, संपर्क 1, 2, 3, 4 बंद हैं, जबकि मोटर एम 1 और एम 2 चालू हैं, साथ ही प्रकाश बल्ब H1, H2, NC, H4 भी चालू हैं। "सही" स्थिति में, संपर्क 1, 2 बंद हैं, जबकि एम1 इंजन और एनसी लैंप चालू हैं। रुकने की स्थिति में, सभी संपर्क खुले हैं। "बाएं" स्थिति में, संपर्क 1, 3 बंद हैं, जबकि इंजन एम 2 और लाइट बल्ब एच 4 चालू हैं। टीमें समय-समय पर बदलती रहती हैं। आरेख एक चक्र में आदेशों का क्रम दिखाता है। सिस्टम की स्थापना और कमीशनिंग के लिए निर्देशखिलौने में रिसीवर को ईमेल से अधिकतम दूरी पर रखना वांछनीय है। मोटरें और विद्युत चुम्बक। रिसीवर को इलेक्ट्रिक मोटर्स के कारण होने वाले हस्तक्षेप से बचाने के लिए, कनेक्शन की ध्रुवता को देखते हुए, इलेक्ट्रिक मोटर्स के समानांतर 10-12 वोल्ट के ऑपरेटिंग वोल्टेज के साथ 10-20 माइक्रोफ़ारड के इलेक्ट्रोलाइटिक कैपेसिटर को जोड़ने की सिफारिश की जाती है। एक एंटीना रिसीवर से जुड़ा होना चाहिए। 1.0-2.0 मिमी के व्यास और कम से कम 20 सेमी की लंबाई वाले एक पिन या तार को एंटीना के रूप में इस्तेमाल किया जा सकता है। एंटीना को खिलौने के शरीर से अलग किया जाना चाहिए। इंसुलेटर के रूप में, सिरेमिक, फ्लोरोप्लास्टिक, प्लेक्सीग्लास या पॉलीस्टाइनिन से बने हिस्सों का उपयोग किया जा सकता है। एंटीना की लंबाई बढ़ने के साथ, नियंत्रण सीमा भी बढ़ जाती है। रिसीवर को धूल और नमी से बचाने के लिए एक इन्सुलेट सामग्री से ढंका होना चाहिए। मुद्रित सर्किट बोर्ड से उस आधार तक की दूरी जिस पर रिसीवर लगा है कम से कम 5 मिमी होनी चाहिए।
मुद्रित सर्किट बोर्ड पर तत्वों का स्थान चित्र 5 में दिखाया गया है। विद्युत सर्किट स्थापित करने और प्रदर्शन की जांच करने के बाद (स्विचिंग ऑर्डर नीचे दर्शाया गया है), रिसीवर को अधिकतम संवेदनशीलता पर समायोजित करना आवश्यक है। समायोजन कैपेसिटर C4 का उपयोग करके किया जाता है (देखें)। सर्किट आरेखऔर रिसीवर का चित्रण)। कैपेसिटर रोटर को इंसुलेटिंग स्क्रूड्राइवर से घुमाकर, उस स्थिति का पता लगाना आवश्यक है जिस पर खिलौना ट्रांसमीटर से हटाए जाने पर रिले सक्रिय होता है। कमांड उपकरण को पंजों की सहायता से एक क्षैतिज मंच पर स्थापित किया जाता है।
सभी को शुभकामनाएँ, तीन महीने पहले - "मेल आरयू के उत्तरों पर" बैठे हुए मुझे एक प्रश्न मिला: http://otvet.mail.ru/question/92397727, मेरे द्वारा दिए गए उत्तर के बाद, प्रश्न के लेखक ने शुरुआत की मुझे व्यक्तिगत रूप से लिखने के लिए, पत्राचार से यह ज्ञात हुआ कि टोव। "इवान रूज़िट्स्की", उर्फ "STAWR" लोहे के "महंगे" कारखाने के टुकड़ों के बिना, यदि संभव हो तो, एक आर/ए मशीन बनाता है।
खरीद से, उनके पास 433 मेगाहर्ट्ज आरएफ मॉड्यूल और रेडियो घटकों की एक "बाल्टी" थी।
ऐसा नहीं है कि मैं इस विचार से "बीमार" था, लेकिन फिर भी मैंने तकनीकी पक्ष से इस परियोजना को लागू करने की संभावना के बारे में सोचना शुरू कर दिया।
उस समय, मैं पहले से ही रेडियो नियंत्रण सिद्धांत (मुझे ऐसा लगता है) में काफी पारंगत था, इसके अलावा; कुछ विकास पहले से ही सेवा में थे।
खैर, जो लोग रुचि रखते हैं उनके लिए - प्रशासन एक बटन लेकर आया है......
इसलिए:
सभी नोड्स क्रमशः "घुटने पर" बनाए गए थे, कोई "सुंदरता" नहीं थी, मुख्य कार्य यह पता लगाना है कि यह परियोजना कितनी व्यवहार्य है और रूबल और श्रम में यह कितना "बाहर निकलेगी"।
दूरवर्ती के नियंत्रक:
मैंने दो कारणों से घरेलू ट्रांसमीटर नहीं बनाया:
1. इवान के पास यह पहले से ही है।
2. एक बार मैंने 27 मेगाहर्ट्ज को हिलाने की कोशिश की - इससे कुछ भी अच्छा नहीं हुआ।
चूँकि नियंत्रण आनुपातिक माना जाता था, चीनी कूड़ेदान से सभी रिमोट अपने आप दूर हो गए।
मैंने इस साइट से एनकोडर योजना (चैनल एनकोडर) ली: http://ivan.bmstu.ru/avia_site/r_main/HWR/TX/CODERS/3/index.html
लेखकों को बहुत-बहुत धन्यवाद, यह इस उपकरण के कारण था कि मुझे एमके को "फ्लैश" करना सीखना पड़ा।
मैंने ट्रांसमीटर और रिसीवर यहीं "पार्क" में खरीदा, हालाँकि 315 मेगाहर्ट्ज पर, मैंने सस्ता चुना:
एनकोडर वाली साइट में आपकी ज़रूरत की हर चीज़ मौजूद है - सर्किट ही, मुद्रित सर्किट बोर्ड"लोहे के नीचे" और विभिन्न लागतों के साथ फर्मवेयर का एक पूरा गुच्छा।
रिमोट कंट्रोल की बॉडी फाइबरग्लास से सोल्डर की गई है, मैंने आईआर कंट्रोल पर हेलीकॉप्टर रिमोट कंट्रोल से स्टिक लीं, यह कंप्यूटर गेमपैड से संभव था, लेकिन मेरी पत्नी मुझे मार डालेगी, वह इस पर डीएमसी खेलती है, बैटरी कम्पार्टमेंट उसी से रिमोट कंट्रोल।
एक रिसीवर है, लेकिन कार चलाने के लिए, आपको एक डिकोडर (चैनल डिकोडर) की भी आवश्यकता होती है, इसलिए मुझे इसे बहुत लंबे समय तक देखना पड़ा - मुझे Google को भी पसीना आ गया, ठीक है, जैसा कि वे कहते हैं, " साधक इसे ढूंढ लेगा” और यह यहां है: http://homepages .paradise.net.nz/bhabbbot/decoder.html
एमके के लिए फर्मवेयर भी हैं।
नियामक: प्रारंभ में, मैंने वह बनाया जो सरल है:

लेकिन केवल बिना बर्फ के सामने सवारी करने के लिए इसे चुना गया: 
साइट से लिंक: http://vrtp.ru/index.php?showtopic=18549&st=600
फर्मवेयर भी हैं.
मदरबोर्ड और वीडियो कार्ड के पहाड़ को तोड़ने पर ऊपरी कंधे (पी-चैनल) के लिए आवश्यक ट्रांजिस्टर नहीं मिले, इसलिए एच-ब्रिज (यह मोटर को खिलाने वाला नोड है) को तोशिबोव माइक्रोक्रिकिट के आधार पर मिलाया गया था TA7291P वीसीआर से,

अधिकतम करंट 1.2A है - जो मेरे लिए काफी अनुकूल है (TRAXXAS नहीं - मैं ऐसा करता हूं), मैंने बोर्ड को 20r के लिए एक मार्कर के साथ खींचा, फेरिक क्लोराइड के साथ उकेरा, पटरियों के किनारे से टांका लगाया। यहाँ क्या हुआ.


"शुद्ध" पीपीएम हवा में उत्सर्जित होता है, बेशक, यह अच्छा नहीं है, मैं इसे हवाई जहाज पर नहीं रखूंगा, लेकिन एक खिलौने के लिए यह उसी तरह काम करेगा।
मशीन को चीनी भाइयों से कारखाने से लिया गया था, चालू इंजन को छोड़कर सभी जनजाति को हटा दिया गया था और इवान के साथ हमारा प्रोजेक्ट इसके स्थान पर रखा जाएगा, हालांकि हम इसमें अलग से व्यस्त हैं, यह उनका विचार है!
खर्च किया गया:
आरएफ मॉड्यूल का एक सेट - 200 रूबल
दो एमके PIC12F675 - प्रत्येक 40 रूबल।
सर्व - TG9e 75r
+3 अपराह्न.
यदि आपके कोई प्रश्न हैं तो मुझे उत्तर देने में खुशी होगी (मैंने इसके बारे में ज्यादा कुछ नहीं लिखा)
साभार, वसीली।
इस पोस्ट को पढ़ने के बाद, मैं अपना खुद का हवाई जहाज बनाने के विचार से उत्साहित हो गया। मैंने तैयार चित्र लिए, चीनियों से मोटरें, बैटरियाँ और प्रोपेलर मंगवाए। लेकिन मैंने खुद रेडियो नियंत्रण करने का फैसला किया, सबसे पहले - यह अधिक दिलचस्प है, दूसरे - जब तक बाकी स्पेयर पार्ट्स के साथ पैकेज जा रहा है तब तक मुझे खुद को किसी चीज़ में व्यस्त रखने की ज़रूरत है, और तीसरा - मूल होना और सब कुछ जोड़ना संभव हो गया तरह-तरह की अच्छाइयाँ।
तस्वीरों से सावधान रहें!
कैसे और क्या प्रबंधन करें
सामान्य लोग एक रिसीवर लेते हैं, उसमें सर्वो, एक स्पीड कंट्रोलर चिपकाते हैं, रिमोट कंट्रोल पर लीवर घुमाते हैं और संचालन के सिद्धांतों के बारे में पूछे बिना और विवरण में गए बिना जीवन का आनंद लेते हैं। हमारे मामले में, यह काम नहीं करेगा. पहला काम यह पता लगाना था कि सर्वो को कैसे नियंत्रित किया जाता है। सब कुछ काफी सरल हो जाता है, ड्राइव में तीन तार होते हैं: + पावर, - पावर और सिग्नल। सिग्नल तार पर, चर कर्तव्य चक्र के आयताकार पल्स। यह क्या है यह समझने के लिए चित्र देखें:
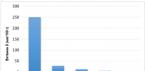
इसलिए, यदि हम ड्राइव को चरम बाईं स्थिति पर सेट करना चाहते हैं, तो हमें 20 एमएस के अंतराल के साथ 0.9 एमएस की अवधि के साथ पल्स भेजने की आवश्यकता है, यदि चरम दाईं ओर - 2.1 एमएस की अवधि है, तो अंतराल समान है , ठीक है, मध्य स्थितियाँ समान हैं। जैसा कि यह निकला, गति नियंत्रकों को उसी तरह नियंत्रित किया जाता है। जो लोग इस विषय में हैं वे कहेंगे कि यह एक साधारण पीडब्लूएम है, जिसे किसी भी माइक्रोकंट्रोलर पर लागू करना एक मामूली बात है। इसलिए मैंने ऐसा निर्णय लिया, मैंने एक स्थानीय स्टोर से एक सर्वो मशीन खरीदी और इसके लिए एक ब्रेडबोर्ड पर ATtiny13 पर एक तथाकथित सर्वो टेस्टर लगाया। और फिर यह पता चला कि पीडब्लूएम बिल्कुल सरल नहीं है, लेकिन नुकसान के साथ है। जैसा कि उपरोक्त चित्र से देखा जा सकता है, कर्तव्य चक्र (पल्स अवधि और अवधि अवधि का अनुपात) 5% से 10% तक है (भविष्य में, मैं 1.0 एमएस और 2.0 एमएस की अवधि के साथ पल्स को चरम के रूप में लेता हूं) स्थिति) 256-अंकीय PWM काउंटर ATtiny13 के लिए, यह 25 से 50 तक के मानों से मेल खाती है। लेकिन यह प्रदान किया जाता है कि काउंटर को भरने में 20ms लगते हैं, लेकिन वास्तव में यह काम नहीं करेगा, और 9.6 मेगाहर्ट्ज की आवृत्ति के लिए और 1024 का एक प्रीस्केलर, आपको काउंटर को 187 (टॉप) तक सीमित करने की आवश्यकता है, जिस स्थिति में हमें 50.134 हर्ट्ज की आवृत्ति मिलती है। अधिकांश (यदि सभी नहीं) सर्वो में सटीक संदर्भ आवृत्ति जनरेटर नहीं होता है और इसलिए नियंत्रण सिग्नल की आवृत्ति थोड़ी फ़्लोट हो सकती है। यदि आप काउंटर 255 के टॉप को छोड़ देते हैं, तो नियंत्रण सिग्नल की आवृत्ति 36.76 हर्ट्ज होगी - कुछ ड्राइव पर यह काम करेगा (संभवतः गड़बड़ियों के साथ), लेकिन सभी पर नहीं। तो, अब हमारे पास 187-अंकीय काउंटर है, इसके लिए 5-10% 10 से 20 तक के मानों के अनुरूप हैं - केवल 10 मान, यह थोड़ा अलग हो जाएगा। यदि आप घड़ी की गति और प्रीस्केलर के साथ खेलने के बारे में सोच रहे हैं, तो यहां 8-बिट पीडब्लूएम के लिए एक तुलना तालिका है:

लेकिन आख़िरकार, अधिकांश माइक्रोकंट्रोलर्स में PWM उत्पन्न करने के लिए 16-बिट (या अधिक) टाइमर होता है। यहां विसंगति की समस्या तुरंत गायब हो जाएगी और आवृत्ति को सटीक रूप से सेट किया जा सकता है। मैं लंबे समय तक पेंटिंग नहीं करूंगा, मैं तुरंत संकेत देता हूं: 
मुझे नहीं लगता कि चीनी सर्वो के लिए 600 और 1200 मूल्यों के बीच कोई महत्वपूर्ण अंतर है, इसलिए स्थिति सटीकता के मुद्दे को बंद माना जा सकता है।
मल्टीचैनल प्रबंधन
हमने एक सर्वो का पता लगाया, लेकिन एक हवाई जहाज के लिए आपको उनमें से कम से कम तीन की आवश्यकता होती है और एक गति नियंत्रक की भी आवश्यकता होती है। एक सीधा समाधान 16-बिट पीडब्लूएम के चार चैनलों वाला एक माइक्रोकंट्रोलर लेना है, लेकिन ऐसा नियंत्रक महंगा होगा और, सबसे अधिक संभावना है, बोर्ड पर बहुत अधिक जगह लेगा। दूसरा विकल्प सॉफ़्टवेयर PWM का उपयोग करना है, लेकिन CPU समय लेना भी एक विकल्प नहीं है। यदि आप सिग्नल आरेखों को फिर से देखें, तो 80% समय इसमें कोई जानकारी नहीं होती है, इसलिए पीडब्लूएम के साथ केवल 1-2 एमएस आवेग सेट करना अधिक तर्कसंगत होगा। कर्तव्य चक्र इतनी संकीर्ण सीमाओं के भीतर क्यों बदलता है, क्योंकि कम से कम 10-90% के कर्तव्य चक्र के साथ दालों को बनाना और पढ़ना आसान होगा? हमें सिग्नल के उस गैर-सूचनात्मक टुकड़े की आवश्यकता क्यों है जो 80% समय घेरता है? मुझे संदेह था कि शायद इन 80% पर अन्य एक्चुएटर्स के आवेगों का कब्जा हो सकता है, और फिर यह सिग्नल कई अलग-अलग हिस्सों में विभाजित हो जाता है। अर्थात्, 20ms अवधि की अवधि में, 1-2ms की अवधि के साथ 10 पल्स फिट हो सकते हैं, फिर इस सिग्नल को किसी प्रकार के डिमल्टीप्लेक्सर द्वारा केवल 20ms की अवधि अवधि के साथ 10 अलग-अलग हिस्सों में विभाजित किया जाता है। कहने से पहले, मैंने प्रोटियस में निम्नलिखित चित्र बनाया:
एक डिमल्टीप्लेक्सर - 74HC238 की भूमिका में, माइक्रोकंट्रोलर के आउटपुट से दालों को इसके इनपुट ई में फीड किया जाता है। ये पल्स 2ms (500Hz) की अवधि और 50-100% के कर्तव्य चक्र के साथ PWM हैं। प्रत्येक पल्स का अपना कर्तव्य चक्र होता है, जो प्रत्येक चैनल की स्थिति को दर्शाता है। इनपुट E पर सिग्नल इस प्रकार दिखता है:

74HC238 को यह जानने के लिए कि वर्तमान सिग्नल को किस आउटपुट पर लागू करना है, हम माइक्रोकंट्रोलर के PORTC और डेमल्टीप्लेक्सर के इनपुट A, B, C का उपयोग करते हैं। परिणामस्वरूप, हमें आउटपुट पर निम्नलिखित संकेत मिलते हैं:

आउटपुट सिग्नल सही आवृत्ति (50Hz) और कर्तव्य चक्र (5-10%) के साथ प्राप्त होते हैं। तो, आपको 500 हर्ट्ज की आवृत्ति और 50-100% की फिलिंग के साथ एक पीडब्लूएम उत्पन्न करने की आवश्यकता है, यहां 16-बिट काउंटर के प्रीस्केलर और टॉप को सेट करने के लिए एक प्लेट है:

दिलचस्प बात यह है कि पीडब्लूएम मानों की संभावित संख्या टाइमर आवृत्ति से ठीक 1000 गुना कम है।
सॉफ्टवेयर कार्यान्वयन
AtmelStudio6 में 16 मेगाहर्ट्ज की घड़ी आवृत्ति के साथ ATmega8 के लिए सब कुछ निम्नानुसार लागू किया गया है: सबसे पहले, हम सर्वो की चरम स्थिति के लिए काउंटर मान परिभाषित करते हैं:#कम 16000यू परिभाषित करें #उच्च 32000यू परिभाषित करें
फिर हम टाइमर/काउंटर1 पर PWM जेनरेटर प्रारंभ करते हैं:
OCR1A = उच्च; //टीओआर टीसीसीआर1ए = 0 सेट करें<
ISR(TIMER1_COMPA_vect) //अगले पल्स की शुरुआत से ठीक पहले, ऊपरी काउंटर वैल्यू तक पहुंचने पर इंटरप्ट (//c_num एक वेरिएबल है जो वर्तमान चैनल की संख्या को इंगित करता है, चैनल चैनल मानों की एक सरणी है यदि (c_num)<= 7) { OCR1B = channels; } else { OCR1B = 0; //отключаем ШИМогенератор для несуществующих в демультиплексоре 8 и 9 канала } } ISR(TIMER1_COMPB_vect, ISR_NOBLOCK)// прерывание возникающее в конце импульса { if (c_num <= 7) { PORTC = c_num; //для каналов 0-7 выводим номер канала на PORTC } //и изменяем значение счетчика от 0 до 9 if (c_num >= 9) (c_num = 0; ) अन्यथा ( c_num++; ) )
हम विश्व स्तर पर इंटरप्ट को सक्षम करते हैं और यही है, चैनलों में निम्न से उच्च तक मान सेट करके, हम चैनलों पर मान बदलते हैं।
हार्डवेयर में कार्यान्वयन
खैर, सिद्धांत का पता चलने के बाद, यह सब लागू करने का समय आ गया है। ATmega8A माइक्रोकंट्रोलर को सिस्टम के मस्तिष्क के रूप में चुना गया था, जो 16 मेगाहर्ट्ज पर क्वार्ट्ज से क्लॉक किया गया था (इसलिए नहीं कि मैं 16,000 सर्वो पोजीशन चाहता था, बल्कि इसलिए कि मेरे पास ऐसे ही पड़े थे)। एमके के लिए नियंत्रण संकेत यूएआरटी के माध्यम से आएगा। परिणाम यह चित्र है:
थोड़ी देर बाद यह दुपट्टा सामने आया:


मैंने दो तीन-पिन कनेक्टरों को सोल्डर नहीं किया क्योंकि मुझे उनकी आवश्यकता नहीं है, और वे एक पंक्ति में सोल्डर नहीं हैं क्योंकि मेरे पास छेदों का धातुकरण नहीं है, और निचले कनेक्टर में, दोनों तरफ के ट्रैक को बदला जा सकता है तार के साथ, लेकिन किसी भी कनेक्टर को प्रोग्रामेटिक रूप से सिग्नल आउटपुट करने में कोई समस्या नहीं है। 78एल05 भी गायब है क्योंकि मेरे इंजन रेगुलेटर में एक अंतर्निर्मित स्टेबलाइजर (वजन) है।
डेटा प्राप्त करने के लिए, HM-R868 रेडियो मॉड्यूल बोर्ड से जुड़ा है:

शुरू में मैंने इसे सीधे बोर्ड में चिपकाने का सोचा था, लेकिन यह डिज़ाइन हवाई जहाज में फिट नहीं हुआ, मुझे इसे केबल के माध्यम से करना पड़ा। यदि आप फ़र्मवेयर बदलते हैं, तो प्रोग्रामिंग कनेक्टर के संपर्कों का उपयोग कुछ सिस्टम (साइड लाइट, आदि) को चालू / बंद करने के लिए किया जा सकता है।
बोर्ड की लागत लगभग UAH 20 = $2.50 है, रिसीवर - UAH 30 = $3.75।
पारेषण भाग
एक विमान का हिस्सा है, यह जमीनी उपकरणों से निपटने के लिए बना हुआ है। जैसा कि पहले उल्लेख किया गया है, डेटा यूएआरटी के माध्यम से प्रसारित होता है, प्रति चैनल एक बाइट। सबसे पहले, मैंने अपने सिस्टम को एक एडाप्टर के माध्यम से एक तार के माध्यम से कंप्यूटर से जोड़ा और टर्मिनल के माध्यम से कमांड भेजा। डिकोडर को पैकेज की शुरुआत निर्धारित करने के लिए, और भविष्य में इसे विशेष रूप से संबोधित पैकेजों का चयन करने के लिए, पहले एक पहचानकर्ता बाइट भेजा जाता है, फिर 8 बाइट्स भेजे जाते हैं जो चैनलों की स्थिति निर्धारित करते हैं। बाद में उन्होंने रेडियो मॉड्यूल का उपयोग करना शुरू किया, जब ट्रांसमीटर बंद हो गया, तो सभी मोटरें बेतहाशा हिलने लगीं। शोर से सिग्नल को फ़िल्टर करने के लिए, मैं दसवीं बाइट के साथ सभी 9 पिछले बाइट्स का XOR भेजता हूं। इससे मदद मिली, लेकिन कमजोर रूप से, मैंने बाइट्स के बीच टाइमआउट के लिए एक और चेक जोड़ा, यदि यह पार हो गया है - पूरे प्रेषण को नजरअंदाज कर दिया जाता है और रिसेप्शन फिर से शुरू होता है, पहचानकर्ता बाइट की प्रतीक्षा करता है। XOR के रूप में एक चेकसम जोड़ने के साथ, टर्मिनल से कमांड भेजना तनावपूर्ण हो गया, इसलिए मैंने जल्दी से इस प्रोग्राम को स्लाइडर्स के साथ जोड़ दिया:
निचले बाएँ कोने में मौजूद संख्या चेकसम है। कंप्यूटर पर स्लाइडर्स को घुमाने से विमान के पतवार हिल गए! सामान्य तौर पर, मैंने यह सब डिबग किया और रिमोट कंट्रोल के बारे में सोचना शुरू किया, मैंने इसके लिए निम्नलिखित जॉयस्टिक खरीदे:
लेकिन तभी मेरे मन में एक विचार आया. एक समय में, मैंने खुद को सभी प्रकार के उड़ान सिमुलेटरों से खींच लिया: "IL-2 स्टुरमोविक", "लॉक ऑन", "MSFSX", "Ka-50 ब्लैक शार्क", आदि। तदनुसार, मेरे पास एक जीनियस F-23 जॉयस्टिक था और मैंने इसे स्लाइडर्स के साथ उपरोक्त प्रोग्राम में जोड़ने का निर्णय लिया। गूगल पर खोजा कि इसे कैसे लागू किया जाए, यह पोस्ट मिली और यह काम कर गया! मुझे ऐसा लगता है कि एक पूर्ण जॉयस्टिक के साथ हवाई जहाज उड़ाना रिमोट कंट्रोल पर एक छोटी सी छड़ी की तुलना में बहुत अच्छा है। सामान्य तौर पर, पहली तस्वीर में सब कुछ एक साथ दिखाया गया है - यह एक नेटबुक, एक जॉयस्टिक, FT232 पर एक कनवर्टर और इससे जुड़ा HM-T868 ट्रांसमीटर है। कनवर्टर प्रिंटर से 2 मीटर केबल से जुड़ा हुआ है, जो आपको इसे किसी प्रकार के पेड़ या इसी तरह की किसी चीज़ पर माउंट करने की अनुमति देता है।
शुरू करना!
तो, वहाँ एक विमान है, वहाँ रेडियो नियंत्रण है - चलो चलते हैं! (सी) पहली उड़ान डामर पर की गई थी, नतीजा आधा फटा हुआ धड़ और आधा फटा हुआ इंजन है। दूसरी उड़ान नरम सतह पर की गई:अगली 10 उड़ानें भी बहुत सफल नहीं रहीं. मुझे लगता है कि मुख्य कारण, जॉयस्टिक की मजबूत विसंगति है - इसने रोल में केवल 16 मान दिए (संभव 256 के बजाय), पिच अक्ष के साथ - इससे बेहतर कोई नहीं। लेकिन चूंकि, परीक्षणों के परिणामस्वरूप, विमान काफी क्षतिग्रस्त हो गया था और उसकी मरम्मत नहीं की जा सकती थी:

- इस संस्करण की सत्यता की पुष्टि करना अभी संभव नहीं है। यह संस्करण वीडियो में रिकॉर्ड किए गए विमान को समतल करने के प्रयास द्वारा भी समर्थित है - यह किनारे से उड़ता है, और फिर अचानक विपरीत दिशा में गिर जाता है (और इसे आसानी से होना चाहिए)। यहाँ एक अधिक दृश्य वीडियो है:
उपकरण की रेंज लगभग 80 मीटर है, यह आगे भी पकड़ती है, लेकिन हर बार।
खैर, बस इतना ही, आपके ध्यान के लिए धन्यवाद। मुझे आशा है कि प्रदान की गई जानकारी किसी के लिए उपयोगी होगी। मुझे सभी प्रश्नों का उत्तर देने में खुशी होगी।
संग्रह में, प्रोटियस के लिए बोर्ड की योजना और वायरिंग।
मुख्य तकनीकी डेटा
रेडियो नियंत्रण प्रणाली आपको 10 मीटर तक की दूरी पर खिलौने को दूर से नियंत्रित करने की अनुमति देती है।
ट्रांसमीटर की ऑपरेटिंग आवृत्ति 27.12 मेगाहर्ट्ज है।
ट्रांसमीटर की शक्ति 4-10 मेगावाट के भीतर है।
ट्रांसमीटर की वर्तमान खपत 20 mA से अधिक नहीं है।
एंटीना और बिजली आपूर्ति के साथ ट्रांसमीटर का वजन 150 ग्राम से अधिक नहीं है।
ऑपरेटिंग फ़्रीक्वेंसी बैंड में रिसीवर की संवेदनशीलता 100 μV से अधिक खराब नहीं है।
रिसीवर की वर्तमान खपत 20 mA से अधिक नहीं है।
रिसीवर का वजन 70 ग्राम से अधिक नहीं है।
कमांड डिवाइस चार अलग-अलग कमांड का निष्पादन प्रदान करता है, जिन्हें समय-समय पर दोहराया जाता है।
कमांड डिवाइस का वजन 70 ग्राम से अधिक नहीं है।
रिसीवर और ट्रांसमीटर क्रोना-वीटीएस बैटरी द्वारा संचालित होते हैं।
संचालन का सिद्धांत
ट्रांसमीटर में एक मॉड्यूलेटर और एक उच्च आवृत्ति जनरेटर होता है (चित्र 1)। ट्रांसमीटर मॉड्यूलेटर एक सममित मल्टीवाइब्रेटर है जो MP40 प्रकार के कम-आवृत्ति ट्रांजिस्टर VT2 और VT3 पर इकट्ठा होता है।
उच्च-आवृत्ति जनरेटर को कैपेसिटिव फीडबैक सर्किट के अनुसार ट्रांजिस्टर VT1 प्रकार P416 पर इकट्ठा किया जाता है। जब VT2 मॉड्यूलेटर ट्रांजिस्टर खुला होता है, तो जनरेटर सर्किट बैटरी के सकारात्मक के करीब बंद हो जाता है, जनरेटर ऑपरेटिंग आवृत्ति पर उत्तेजित होता है, एंटीना द्वारा एक उच्च आवृत्ति संकेत उत्सर्जित होता है।
रिसीवर में एक उच्च आवृत्ति चरण, एक कम आवृत्ति एम्पलीफायर और एक इलेक्ट्रॉनिक रिले होता है।
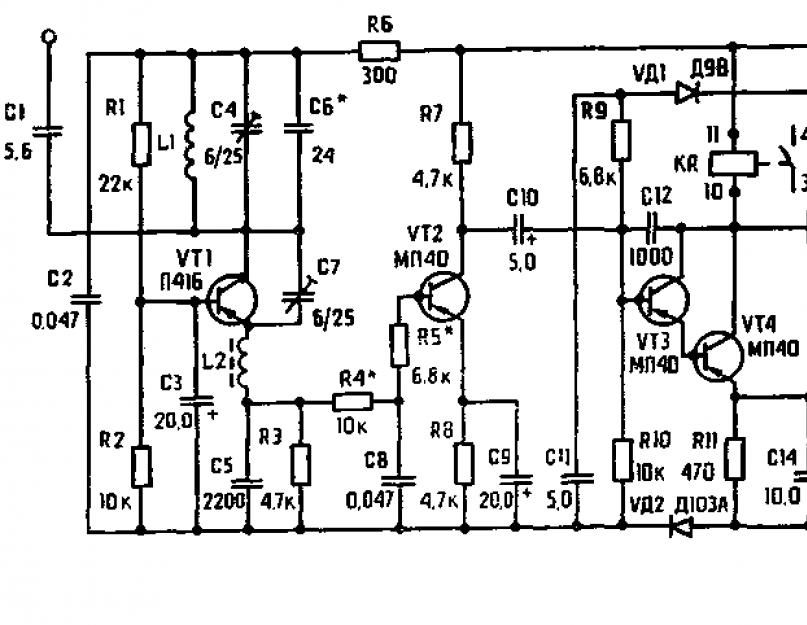
रिसीवर का उच्च-आवृत्ति कैस्केड एक सुपर-रीजेनरेटर है। सुपर-रीजेनरेटर को P416 प्रकार के उच्च-आवृत्ति ट्रांजिस्टर VT1 पर इकट्ठा किया गया है (चित्र 2)।

अंक 2
उत्सर्जक श्रृंखला C5 R3 पर सिग्नल की अनुपस्थिति में, शमन आवृत्ति में दोलन देखे जाते हैं। भिगोना आवृत्ति अपने ऑपरेटिंग आवृत्ति पर सुपर-रीजेनरेटर की संवेदनशीलता निर्धारित करती है और तत्वों C5, R3 द्वारा चुनी जाती है।
ट्रांसमीटर का कमांड सिग्नल L1-C4 सर्किट द्वारा चुना जाता है, सुपर-रीजेनरेटर द्वारा प्रवर्धित और पता लगाया जाता है। R4-C8 फ़िल्टर उच्च-क्रम डंपिंग आवृत्ति को अलग करते हुए, कम-आवृत्ति कमांड सिग्नल को VT2 एम्पलीफायर के इनपुट में भेजता है।
इलेक्ट्रॉनिक रिले को MP40 प्रकार के ट्रांजिस्टर VT3-VT4 पर इकट्ठा किया जाता है, और VT4 ट्रांजिस्टर का कलेक्टर PCM-1 प्रकार के कार्यकारी रिले KR से जुड़ा होता है।
कमांड सिग्नल की कम-आवृत्ति वोल्टेज को ट्रांजिस्टर VT3-VT4 द्वारा प्रवर्धित किया जाता है और कैपेसिटर C13 के माध्यम से रेक्टिफायर सेल UD1, UDZ को खिलाया जाता है।
रोकनेवाला R9 के माध्यम से सुधारित वोल्टेज को ट्रांजिस्टर VT3 के आधार पर आपूर्ति की जाती है। इस स्थिति में, ट्रांजिस्टर VT3 का उत्सर्जक धारा तेजी से बढ़ जाती है, ट्रांजिस्टर VT4 खुल जाता है। रिले सक्रिय हो जाता है, जिससे कमांड डिवाइस मोटर का बिजली आपूर्ति सर्किट बंद हो जाता है।
कमांड डिवाइस में एक इलेक्ट्रिक मोटर, एक रैचेट मैकेनिज्म, एक प्रोग्राम डिस्क और वितरणात्मक स्लाइडिंग संपर्क होते हैं। प्रोग्राम डिस्क, जिसके किनारे जंपर्स की एक प्रणाली है, वितरण स्लाइडिंग संपर्कों के माध्यम से ड्राइव मोटर्स और खिलौने के अन्य विद्युत तत्वों की बिजली आपूर्ति को स्विच करती है।
रेडियो-नियंत्रित खिलौने के विद्युत सर्किट का विवरण
आरेख (चित्र 3) रेडियो-नियंत्रित खिलौने के विद्युत उपकरण के विकल्पों में से एक को दर्शाता है।
खिलौने में दो ड्राइव मोटर हैं जो आगे की गति प्रदान करती हैं और बाएँ और दाएँ मुड़ती हैं। खिलौने के पीछे के लाइट बल्ब टर्न सिग्नल के रूप में काम करते हैं। दो हेडलाइट्स खिलौने के पथ को रोशन करने का प्रभाव पैदा करती हैं।

चित्र 3
ट्रांसमीटर से कमांड सिग्नल प्राप्त करने के लिए, एक रिसीवर और एक कमांड उपकरण खिलौने में बनाया गया है। ड्राइव का इंजन और कमांड डिवाइस, साथ ही लाइट बल्ब, 3336L (U) (GB1) प्रकार की दो श्रृंखला-कनेक्टेड बैटरियों द्वारा संचालित होते हैं। रिसीवर एक बैटरी "क्रोना-वीटी" (जीबी2) द्वारा संचालित होता है। बैटरी को बंद करने के लिए, दो-पोल स्विच एस का उपयोग किया जाता है। जब ट्रांसमीटर से एक कमांड सिग्नल प्राप्त होता है, तो रिले केआर, रिसीवर सक्रिय हो जाता है और, अपने संपर्कों के साथ, कमांड डिवाइस की इलेक्ट्रिक मोटर को चालू कर देता है (चित्र) . 4) एमजेड.

चित्र.4. कमान उपकरण
एमजेड इलेक्ट्रिक मोटर, रैचेट तंत्र का उपयोग करके, प्रोग्राम डिस्क को 30 ° घुमाती है, जो एक कमांड को स्विच करने के अनुरूप है।
प्रोग्राम डिस्क, वितरण स्लाइडिंग संपर्कों के माध्यम से, ड्राइव के इलेक्ट्रिक मोटर और खिलौने के प्रकाश बल्बों को निम्नानुसार चालू करता है:
"आगे" स्थिति में, संपर्क 1, 2, 3, 4 बंद हो जाते हैं, जबकि इंजन एम 1 और एम 2 चालू हो जाते हैं, साथ ही बल्ब एच 1, एच 2, एनसी, एच 4 भी चालू हो जाते हैं।
"सही" स्थिति में, संपर्क 1, 2 बंद हैं, जबकि एम1 इंजन और एनसी लैंप चालू हैं।
"स्टॉप" स्थिति में, सभी संपर्क खुले हैं।
"बाएं" स्थिति में, संपर्क 1, 3 बंद हैं, जबकि इंजन एम 2 और लाइट बल्ब एच 4 चालू हैं।
टीमें समय-समय पर बदलती रहती हैं। आरेख एक चक्र में आदेशों का क्रम दिखाता है।
सिस्टम की स्थापना और कमीशनिंग के लिए निर्देश
खिलौने में रिसीवर को ईमेल से अधिकतम दूरी पर रखना वांछनीय है। मोटरें और विद्युत चुम्बक। रिसीवर को इलेक्ट्रिक मोटर्स के कारण होने वाले हस्तक्षेप से बचाने के लिए, कनेक्शन की ध्रुवता को देखते हुए, इलेक्ट्रिक मोटर्स के समानांतर 10-12 वोल्ट के ऑपरेटिंग वोल्टेज के साथ 10-20 माइक्रोफ़ारड के इलेक्ट्रोलाइटिक कैपेसिटर को जोड़ने की सिफारिश की जाती है। एक एंटीना रिसीवर से जुड़ा होना चाहिए। 1.0-2.0 मिमी के व्यास और कम से कम 20 सेमी की लंबाई वाले एक पिन या तार को एंटीना के रूप में इस्तेमाल किया जा सकता है। एंटीना को खिलौने के शरीर से अलग किया जाना चाहिए। इंसुलेटर के रूप में, सिरेमिक, फ्लोरोप्लास्टिक, प्लेक्सीग्लास या पॉलीस्टाइनिन से बने हिस्सों का उपयोग किया जा सकता है। एंटीना की लंबाई बढ़ने के साथ, नियंत्रण सीमा भी बढ़ जाती है। रिसीवर को धूल और नमी से बचाने के लिए एक इन्सुलेट सामग्री से ढंका होना चाहिए। मुद्रित सर्किट बोर्ड से उस आधार तक की दूरी जिस पर रिसीवर लगा है कम से कम 5 मिमी होनी चाहिए।
मुद्रित सर्किट बोर्ड पर तत्वों का स्थान चित्र 5 में दिखाया गया है।
विद्युत सर्किट स्थापित करने और प्रदर्शन की जांच करने के बाद (स्विचिंग ऑर्डर नीचे दर्शाया गया है), रिसीवर को अधिकतम संवेदनशीलता पर समायोजित करना आवश्यक है। समायोजन कैपेसिटर C4 का उपयोग करके किया जाता है (रिसीवर का योजनाबद्ध आरेख और ड्राइंग देखें)। कैपेसिटर रोटर को इंसुलेटिंग स्क्रूड्राइवर से घुमाकर, उस स्थिति का पता लगाना आवश्यक है जिस पर खिलौना ट्रांसमीटर से हटाए जाने पर रिले सक्रिय होता है।
कमांड उपकरण को पंजों की सहायता से एक क्षैतिज मंच पर स्थापित किया जाता है।
रेडियो तत्वों की सूची
| पद | प्रकार | मज़हब | मात्रा | टिप्पणी | दुकान | मेरा नोटपैड | |
|---|---|---|---|---|---|---|---|
| चित्र 1। | |||||||
| वीटी1 | द्विध्रुवी ट्रांजिस्टर | पी416 | 1 | नोटपैड के लिए | |||
| वीटी2, वीटी3 | द्विध्रुवी ट्रांजिस्टर | एमपी40 | 2 | नोटपैड के लिए | |||
| सी 1 | संधारित्र | 24 पीएफ | 1 | नोटपैड के लिए | |||
| सी2 | संधारित्र | 56 पीएफ | 1 | नोटपैड के लिए | |||
| सी 3 | ट्रिमर संधारित्र | 4-15 पीएफ | 1 | नोटपैड के लिए | |||
| सी4, सी7 | संधारित्र | 3300 पीएफ | 2 | नोटपैड के लिए | |||
| सी 5 | संधारित्र | 75 पीएफ | 1 | नोटपैड के लिए | |||
| सी 6 | संधारित्र | 30 पीएफ | 1 | नोटपैड के लिए | |||
| सी8, सी9 | संधारित्र | 0.05uF | 2 | नोटपैड के लिए | |||
| आर1, आर4, आर5 | अवरोध | 22 कोहम | 3 | नोटपैड के लिए | |||
| आर2 | अवरोध | 15 कोहम | 1 | नोटपैड के लिए | |||
| आर3 | अवरोध | 75 ओम | 1 | नोटपैड के लिए | |||
| आर6 | अवरोध | 3 कोहम | 1 | नोटपैड के लिए | |||
| एल1, एल2 | प्रारंभ करनेवाला | 2 | नोटपैड के लिए | ||||
| एस | चातुर्य बटन | 1 | नोटपैड के लिए | ||||
| एक्सएस | ऐन्टेना कनेक्टर | 1 | नोटपैड के लिए | ||||
| हिंदुस्तान टाइम्स | बैटरी "क्रोना" को जोड़ने के लिए कनेक्टर | 1 | नोटपैड के लिए | ||||
| जीबी | बैटरी की ताकत | "क्रोना-वीसी" 9 वोल्ट | 1 | या इसी के समान | नोटपैड के लिए | ||
| चित्र 2। | |||||||
| वीटी1 | द्विध्रुवी ट्रांजिस्टर | पी416 | 1 | नोटपैड के लिए | |||
| VT2-VT4 | द्विध्रुवी ट्रांजिस्टर | एमपी40 | 3 | नोटपैड के लिए | |||
| वीडी1, वीडी3 | डायोड | डी9वी | 2 | नोटपैड के लिए | |||
| वीडी2, वीडी4 | डायोड | केडी103ए | 2 | नोटपैड के लिए | |||
| सी 1 | संधारित्र | 5.6 पीएफ | 1 | नोटपैड के लिए | |||
| सी2, सी8, सी13 | संधारित्र | 0.047uF | 3 | नोटपैड के लिए | |||
| सी3, सी9, सी15 | 20 यूएफ | 3 | नोटपैड के लिए | ||||
| सी4, सी7 | ट्रिमर संधारित्र | 6-25 पीएफ | 2 | नोटपैड के लिए | |||
| सी 5 | संधारित्र | 2200 पीएफ | 1 | नोटपैड के लिए | |||
| सी 6 | संधारित्र | 24 पीएफ | 1 | नोटपैड के लिए | |||
| सी10 | विद्युत - अपघटनी संधारित्र | 5 यूएफ | 1 | नोटपैड के लिए | |||
| सी11 | संधारित्र | 5 यूएफ | 1 | नोटपैड के लिए | |||
| सी12 | संधारित्र | 1000 पीएफ | 1 | नोटपैड के लिए | |||
| सी14 | विद्युत - अपघटनी संधारित्र | 10uF | 1 | नोटपैड के लिए | |||
| आर 1 | अवरोध | 22 कोहम | 1 | नोटपैड के लिए | |||
| आर2, आर4, आर10 | अवरोध | 10 कोहम | 3 | नोटपैड के लिए | |||
| आर3, आर7, आर8 | अवरोध | 4.7 कोहम | 3 | नोटपैड के लिए | |||
| आर5, आर9 | अवरोध | 6.8 कोहम | 2 | ||||
विभिन्न मॉडलों और खिलौनों के रेडियो नियंत्रण के लिए, असतत और आनुपातिक क्रिया उपकरण का उपयोग किया जा सकता है। आनुपातिक और असतत उपकरण के बीच मुख्य अंतर यह है कि यह ऑपरेटर के आदेश पर, मॉडल के पतवारों को किसी भी आवश्यक कोण पर विक्षेपित करने और इसके आंदोलन की गति और दिशा को "आगे" या "पीछे" आसानी से बदलने की अनुमति देता है। आनुपातिक क्रिया उपकरण का निर्माण और समायोजन काफी जटिल है और। हमेशा एक नौसिखिया रेडियो शौकिया के वश में नहीं होता। यद्यपि असतत कार्रवाई उपकरण की सीमित क्षमताएं हैं, लेकिन विशेष तकनीकी समाधानों का उपयोग करके, आप उनका विस्तार कर सकते हैं। इसलिए, आगे हम पहिएदार, उड़ने वाले और तैरते मॉडल के लिए उपयुक्त एकल-कमांड नियंत्रण उपकरण पर विचार करेंगे।
रेडियो नियंत्रित ट्रांसमीटर.
जैसा कि अनुभव से पता चलता है, 500 मीटर के दायरे में मॉडलों को नियंत्रित करने के लिए, लगभग 100 मेगावाट की आउटपुट पावर वाला ट्रांसमीटर होना पर्याप्त है। रेडियो-नियंत्रित मॉडल के ट्रांसमीटर, एक नियम के रूप में, 10 मीटर की सीमा में काम करते हैं। मॉडल का एक-कमांड नियंत्रण निम्नानुसार किया जाता है। जब एक नियंत्रण आदेश दिया जाता है, तो ट्रांसमीटर उच्च-आवृत्ति विद्युत चुम्बकीय दोलन उत्सर्जित करता है, दूसरे शब्दों में, यह एक वाहक आवृत्ति उत्पन्न करता है। रिसीवर, जो मॉडल पर स्थित है, ट्रांसमीटर द्वारा भेजे गए सिग्नल को प्राप्त करता है, जिसके परिणामस्वरूप एक्चुएटर चालू हो गया है। परिणामस्वरूप, मॉडल, आदेश का पालन करते हुए, गति की दिशा बदलता है या मॉडल के डिज़ाइन में पूर्व-एम्बेडेड एक निर्देश को पूरा करता है। एकल-कमांड नियंत्रण मॉडल का उपयोग करके, आप मॉडल से काफी जटिल गतिविधियाँ करा सकते हैं। सिंगल-कमांड ट्रांसमीटर की योजना अंजीर में दिखाई गई है। 22.4. ट्रांसमीटर में एक उच्च आवृत्ति मास्टर ऑसिलेटर और एक मॉड्यूलेटर शामिल है। कैपेसिटिव थ्री-पॉइंट स्कीम के अनुसार, मास्टर ऑसिलेटर को ट्रांजिस्टर VT1 पर असेंबल किया जाता है। ट्रांसमीटर का L2..C2 सर्किट 27.12 मेगाहर्ट्ज की आवृत्ति पर ट्यून किया गया है, जिसे मॉडलों के रेडियो नियंत्रण के लिए राज्य दूरसंचार पर्यवेक्षण प्राधिकरण द्वारा सौंपा गया है। प्रत्यक्ष धारा के लिए जनरेटर के संचालन का तरीका रोकनेवाला R1 के प्रतिरोध मान के चयन से निर्धारित होता है। जनरेटर द्वारा बनाए गए उच्च-आवृत्ति दोलनों को एक मिलान प्रारंभ करनेवाला L1 के माध्यम से सर्किट से जुड़े एंटीना द्वारा अंतरिक्ष में विकिरणित किया जाता है। मॉड्यूलेटर दो ट्रांजिस्टर VT1, VT2 पर बना है और एक सममित मल्टीवाइब्रेटर है। मॉड्यूलेटेड वोल्टेज को ट्रांजिस्टर VT2 के कलेक्टर लोड R4 से हटा दिया जाता है और उच्च-आवृत्ति जनरेटर के ट्रांजिस्टर VT1 के सामान्य पावर सर्किट में खिलाया जाता है, जो 100% मॉड्यूलेशन सुनिश्चित करता है। ट्रांसमीटर को सामान्य पावर सर्किट में शामिल SB1 बटन द्वारा नियंत्रित किया जाता है। मास्टर ऑसिलेटर लगातार काम नहीं करता है, लेकिन केवल तभी काम करता है जब SB1 बटन दबाया जाता है, जब मल्टीवाइब्रेटो द्वारा उत्पन्न वर्तमान पल्स दिखाई देते हैं-
चावल। 22.4. रेडियो-नियंत्रित मॉडल ट्रांसमीटर का योजनाबद्ध आरेख
रम। मास्टर ऑसिलेटर द्वारा बनाए गए उच्च-आवृत्ति दोलनों को अलग-अलग हिस्सों में एंटीना में भेजा जाता है, जिसकी पुनरावृत्ति आवृत्ति मॉड्यूलेटर की पल्स आवृत्ति से मेल खाती है।
ट्रांसमीटर कम से कम 60 के बेस करंट ट्रांसफर गुणांक वाले ट्रांजिस्टर का उपयोग करता है। एमएलटी-0.125 प्रकार के प्रतिरोधक, कैपेसिटर-के10-7, केएम-6। मैचिंग एंटीना कॉइल L1 में PEV-1 0.4 के 12 मोड़ हैं और यह 2.8 मिमी के व्यास के साथ ब्रांड 100NN के ट्यूनिंग फेराइट कोर के साथ पॉकेट रिसीवर से एकीकृत फ्रेम पर घाव है। L2 कॉइल फ़्रेमलेस है और इसमें 10 मिमी के व्यास के साथ एक खराद का धुरा पर PEV-1 0.8 तार घाव के 16 मोड़ हैं। नियंत्रण बटन के रूप में, आप MP-7 प्रकार के माइक्रोस्विच का उपयोग कर सकते हैं। ट्रांसमीटर के हिस्से फ़ॉइल फ़ाइबरग्लास से बने मुद्रित सर्किट बोर्ड पर लगे होते हैं। ट्रांसमीटर एंटीना स्टील इलास्टिक तार 0 1 ... 2 मिमी और लगभग 60 सेमी लंबा का एक टुकड़ा है, जो सीधे मुद्रित सर्किट बोर्ड पर स्थित XI सॉकेट से जुड़ा होता है। ट्रांसमीटर के सभी हिस्से एल्यूमीनियम केस में बंद होने चाहिए। नियंत्रण बटन केस के सामने पैनल पर स्थित है। उस बिंदु पर एक प्लास्टिक इंसुलेटर स्थापित किया जाना चाहिए जहां एंटीना आवास की दीवार से सॉकेट XI तक गुजरता है ताकि एंटीना को आवास को छूने से रोका जा सके।
ज्ञात अच्छे भागों और उचित स्थापना के साथ, ट्रांसमीटर को विशेष समायोजन की आवश्यकता नहीं होती है। केवल यह सुनिश्चित करना आवश्यक है कि यह काम करता है और, कॉइल एल 1 के अधिष्ठापन को बदलकर, ट्रांसमीटर की अधिकतम शक्ति प्राप्त करें। मल्टीवाइब्रेटर के संचालन की जांच करने के लिए, आपको वीटी2 कलेक्टर और पावर स्रोत के प्लस के बीच उच्च-प्रतिबाधा हेडफ़ोन चालू करना होगा। जब SB1 बटन बंद होता है, तो हेडफ़ोन में मल्टीवाइब्रेटर की आवृत्ति के अनुरूप कम पिच वाली ध्वनि सुनाई देनी चाहिए। आरएफ जनरेटर की संचालन क्षमता की जांच करने के लिए, चित्र की योजना के अनुसार वेवमीटर को इकट्ठा करना आवश्यक है। 22.5. सर्किट एक साधारण डिटेक्टर रिसीवर है, जिसमें कॉइल L1 तार PEV-1 1 ... 1.2 के साथ घाव होता है और इसमें 3 मोड़ से एक नल के साथ 10 मोड़ होते हैं। कॉइल को प्लास्टिक फ्रेम Ø 25 मिमी पर 4 मिमी की पिच के साथ लपेटा जाता है। सापेक्ष इनपुट प्रतिरोध वाले डीसी वोल्टमीटर का उपयोग संकेतक के रूप में किया जाता है। 
चावल। 22.5. ट्रांसमीटर ट्यूनिंग के लिए तरंगमापी का योजनाबद्ध आरेख
वर्तमान 50...100 μA के लिए 10 kOhm/V या माइक्रोएमीटर। वेवमीटर को 1.5 मिमी की मोटाई के साथ फ़ॉइल फाइबरग्लास की एक छोटी प्लेट पर इकट्ठा किया जाता है। ट्रांसमीटर को चालू करके उससे 50...60 सेमी की दूरी पर एक वेवमीटर रखें। एक कार्यशील आरएफ जनरेटर के साथ, तरंगमापी सुई शून्य चिह्न से एक निश्चित कोण से विचलित हो जाती है। आरएफ जनरेटर को 27.12 मेगाहर्ट्ज की आवृत्ति पर ट्यून करके, एल 2 कॉइल के घुमावों को स्थानांतरित और विस्तारित करके, वोल्टमीटर सुई का अधिकतम विचलन प्राप्त किया जाता है। ऐन्टेना द्वारा उत्सर्जित उच्च-आवृत्ति दोलनों की अधिकतम शक्ति कॉइल L1 के कोर को घुमाकर प्राप्त की जाती है। ट्रांसमीटर ट्यूनिंग को पूरा माना जाता है यदि ट्रांसमीटर से 1 ... 1.2 मीटर की दूरी पर वेवमीटर वोल्टमीटर कम से कम 0.05 वी का वोल्टेज दिखाता है।
आरसी मॉडल रिसीवर।
मॉडल को नियंत्रित करने के लिए, रेडियो शौकिया अक्सर सुपर-रीजेनरेटर योजना के अनुसार निर्मित रिसीवर का उपयोग करते हैं। यह इस तथ्य के कारण है कि सुपर-पुनर्योजी रिसीवर, एक सरल डिज़ाइन वाला, 10...20 μV के क्रम पर, बहुत उच्च संवेदनशीलता रखता है। मॉडल के लिए सुपर-पुनर्योजी रिसीवर की योजना अंजीर में दिखाई गई है। 22.6. रिसीवर को तीन ट्रांजिस्टर पर इकट्ठा किया जाता है और यह क्रोना बैटरी या किसी अन्य 9V स्रोत द्वारा संचालित होता है। रिसीवर का पहला चरण स्व-शमन के साथ एक सुपर-पुनर्योजी डिटेक्टर है, जो ट्रांजिस्टर VT1 पर बनाया गया है। यदि ऐन्टेना को सिग्नल प्राप्त नहीं होता है, तो यह चरण 60 ... 100 किलोहर्ट्ज़ की आवृत्ति पर उच्च आवृत्ति दोलनों की दालें उत्पन्न करता है। यह अवमंदन आवृत्ति है, जो कैपेसिटर C6 और रेसिस्टर R3 द्वारा निर्धारित की जाती है। तुम्हें प्राप्त करें- 
चावल। 22.6. एक सुपर-पुनर्योजी रेडियो-नियंत्रित मॉडल रिसीवर का योजनाबद्ध आरेख
रिसीवर के सुपर-रीजनरेटिव डिटेक्टर द्वारा विभाजित कमांड सिग्नल निम्नानुसार होता है। ट्रांजिस्टर VT1 एक सामान्य बेस सर्किट के अनुसार जुड़ा हुआ है, और इसका कलेक्टर करंट एक भिगोना आवृत्ति के साथ स्पंदित होता है। यदि रिसीवर के इनपुट पर कोई सिग्नल नहीं है, तो इन दालों का पता लगाया जाता है और रोकनेवाला R3 पर कुछ वोल्टेज बनाते हैं। जिस समय सिग्नल रिसीवर पर पहुंचता है, व्यक्तिगत पल्स की अवधि बढ़ जाती है, जिससे रोकनेवाला आर 3 पर वोल्टेज में वृद्धि होती है। रिसीवर में एक इनपुट सर्किट LI, C4 होता है, जिसे कॉइल कोर L1 का उपयोग करके ट्रांसमीटर की आवृत्ति पर ट्यून किया जाता है। एंटीना के साथ सर्किट का कनेक्शन कैपेसिटिव है। रिसीवर द्वारा प्राप्त नियंत्रण संकेत प्रतिरोधक R4 को आवंटित किया जाता है। यह सिग्नल डैम्पिंग फ्रीक्वेंसी वोल्टेज से 10...30 गुना कम है। शमन आवृत्ति के साथ हस्तक्षेप करने वाले वोल्टेज को दबाने के लिए, सुपररीजेनरेटिव डिटेक्टर और वोल्टेज एम्पलीफायर के बीच एक फिल्टर L3, C7 जुड़ा होता है। उसी समय, फ़िल्टर के आउटपुट पर, शमन आवृत्ति का वोल्टेज उपयोगी सिग्नल के आयाम से 5...10 गुना कम है। पता लगाए गए सिग्नल को आइसोलेशन कैपेसिटर C8 के माध्यम से ट्रांजिस्टर VT2 के आधार पर खिलाया जाता है, जो एक कम-आवृत्ति प्रवर्धन चरण है, और फिर ट्रांजिस्टर VT3 और डायोड VD1, VD2 पर इकट्ठे इलेक्ट्रॉनिक रिले को भेजा जाता है। ट्रांजिस्टर VT3 द्वारा प्रवर्धित सिग्नल को डायोड VD1 और VD2 द्वारा ठीक किया जाता है। रेक्टिफाइड करंट (नकारात्मक ध्रुवता) को ट्रांजिस्टर VT3 के आधार पर आपूर्ति की जाती है। जब इलेक्ट्रॉनिक रिले के इनपुट पर करंट दिखाई देता है, तो ट्रांजिस्टर का कलेक्टर करंट बढ़ जाता है और रिले K1 सक्रिय हो जाता है। एक रिसीवर एंटीना के रूप में, आप 70 ... 100 सेमी की लंबाई के साथ एक पिन का उपयोग कर सकते हैं। सुपर-पुनर्योजी रिसीवर की अधिकतम संवेदनशीलता प्रतिरोधी आर 1 के प्रतिरोध का चयन करके निर्धारित की जाती है।
रिसीवर को 1.5 मिमी की मोटाई और 100x65 मिमी के आयाम के साथ फ़ॉइल फ़ाइबरग्लास से बने बोर्ड पर प्रिंट करके लगाया जाता है। रिसीवर ट्रांसमीटर के समान प्रकार के प्रतिरोधक और कैपेसिटर का उपयोग करता है। L1 सुपर-रीजेनरेटर सर्किट के कॉइल में PELSHO 0.35 तार के 8 मोड़ हैं, एक पॉलीस्टीरीन फ्रेम Ø 6.5 मिमी पर मोड़ने के लिए घाव मोड़, 2.7 मिमी के व्यास और 8 मिमी की लंबाई के साथ 100NN ब्रांड के ट्यूनिंग फेराइट कोर के साथ . चोक में अधिष्ठापन होता है: L2 - 8 μH, और L3 - 0.07 ... 0.1 μH। 200 ओम के प्रतिरोध के साथ एक घुमावदार के साथ विद्युत चुम्बकीय रिले K1 प्रकार RES-6। रिसीवर ट्यूनिंग एक सुपर-पुनर्योजी चरण से शुरू होती है। उच्च-प्रतिबाधा हेडफ़ोन को कैपेसिटर C7 के समानांतर कनेक्ट करें और पावर चालू करें। हेडफ़ोन में दिखाई देने वाला शोर सुपर-रीजेनरेटिव डिटेक्टर के सही संचालन को इंगित करता है। रोकनेवाला R1 के प्रतिरोध को बदलकर, हेडफ़ोन में अधिकतम शोर प्राप्त किया जाता है। VT2 ट्रांजिस्टर और इलेक्ट्रॉनिक रिले पर वोल्टेज प्रवर्धन चरण को विशेष समायोजन की आवश्यकता नहीं होती है। रोकनेवाला R7 के प्रतिरोध का चयन करके, 20 μV के क्रम की रिसीवर संवेदनशीलता प्राप्त की जाती है। रिसीवर का अंतिम समायोजन ट्रांसमीटर के साथ मिलकर किया जाता है। यदि आप हेडफ़ोन को रिले K1 की वाइंडिंग के समानांतर कनेक्ट करते हैं और ट्रांसमीटर चालू करते हैं, तो हेडफ़ोन में एक तेज़ शोर सुनाई देना चाहिए। रिसीवर को ट्रांसमीटर आवृत्ति पर ट्यून करने से हेडफ़ोन में शोर गायब हो जाता है और रिले संचालित होता है।