Põhilised tehnilised andmed Raadiojuhtimissüsteem võimaldab mänguasja kaugjuhtida kuni 10 meetri kauguselt.
Saatja töösagedus on 27,12 MHz.
Saatja võimsus jääb 4-10 mW piiresse.
Saatja voolutarve ei ületa 20 mA.
Antenni ja toiteallikaga saatja kaal ei ületa 150 g.
Vastuvõtja tundlikkus töösagedusalas ei ole halvem kui 100 μV.
Vastuvõtja voolutarve ei ületa 20 mA.
Vastuvõtja kaal ei ületa 70 g.
Käsuseade võimaldab täita nelja erinevat käsku, mida perioodiliselt korratakse.
Juhtseadme kaal ei ületa 70 g.
Vastuvõtja ja saatja toiteallikaks on Krona-VTs akud. Toimimispõhimõte Saatja koosneb modulaatorist ja kõrgsagedusgeneraatorist (joonis 1). Saatja modulaator on sümmeetriline multivibraator, mis on kokku pandud MP40 tüüpi madalsagedustransistoridele VT2 ja VT3.
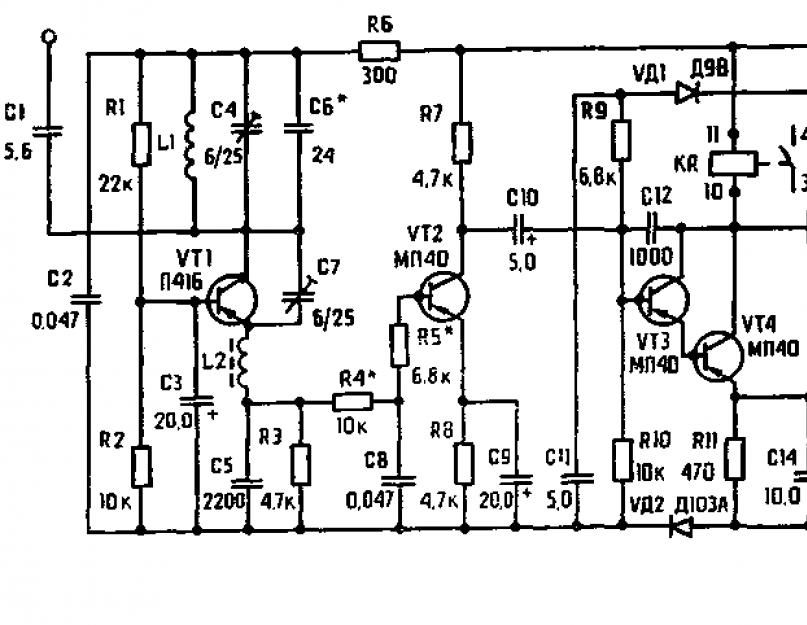
Joonis 1 Kõrgsagedusgeneraator on monteeritud transistorile VT1 tüüpi P416 vastavalt mahtuvusliku tagasiside ahelale. Kui VT2 modulaatori transistor on avatud, sulgub generaatori ahel aku plussi, generaator ergastub töösagedusel, antenn kiirgab kõrgsageduslikku signaali. Vastuvõtja koosneb kõrgsagedusastmest, madalsagedusvõimendist ja elektroonilisest releest. Vastuvõtja kõrgsageduslik kaskaad on superregeneraator. Superregeneraator on monteeritud P416 tüüpi kõrgsagedustransistorile VT1 (joonis 2). 
Joonis 2 Kui emitteri ahelas C5 R3 pole signaali, täheldatakse summutussageduse võnkumisi. Summutamise sagedus määrab superregeneraatori tundlikkuse selle töösagedusel ja valitakse elementide C5, R3 abil. Saatja käsusignaali valib L1-C4 ahel, võimendab ja tuvastab superregeneraator. Filter R4-C8 edastab madala sagedusega käsusignaali VT2 võimendi sisendisse, eraldades samal ajal kõrgemat järku summutussageduse. Elektrooniline relee on kokku pandud MP40 tüüpi transistoridele VT3-VT4 ja VT4 transistori kollektor on ühendatud PCM-1 tüüpi täitevreleega KR. Käsusignaali madalsageduslikku pinget võimendavad transistorid VT3-VT4 ja see juhitakse läbi kondensaatori C13 alaldi rakku UD1, UDZ. Takisti R9 kaudu alaldatud pinge antakse transistori VT3 alusele. Sel juhul suureneb transistori VT3 emitteri vool järsult, transistor VT4 avaneb. Relee aktiveeritakse, sulgedes käsuseadme mootori toiteahela. Käsuseade koosneb elektrimootorist, põrkmehhanismist, programmikettast ja jaotavatest liugkontaktidest. Programmketas, mille külg on džemprite süsteem, lülitab jaotusliugkontaktide kaudu mänguasja ajamimootorite ja muude elektriliste elementide toiteallika. Raadio teel juhitava mänguasja elektriahela kirjeldus Diagramm (joonis 3) näitab ühte raadio teel juhitava mänguasja elektriseadmete võimalust. Mänguasjal on kaks ajamimootorit, mis tagavad edasiliikumise ja pööravad vasakule ja paremale. Mänguasja tagumised lambipirnid toimivad suunatuledena. Kaks esituld loovad mänguasja teed valgustava efekti. 
Joonis 3 Käsusignaalide vastuvõtmiseks saatjalt on mänguasja sisse ehitatud vastuvõtja ja käsuseade. Ajami mootor ja käsuseade ning lambipirnid saavad toite kahest järjestikku ühendatud 3336L (U) (GB1) tüüpi akust. Vastuvõtja toiteallikaks on Krona-VTs aku (GB2). Aku väljalülitamiseks kasutatakse kahepooluselist lülitit S. Käsusignaali vastuvõtmisel saatjalt, releelt KR, aktiveerub vastuvõtja ja lülitab oma kontaktidega sisse käsuseadme elektrimootori (joon. 4) MZ. 
Joonis 4. Käsuseade Elektrimootor MZ pöörab põrkmehhanismi abil programmiketast 30°, mis vastab ühe käsu ümberlülitamisele. Programmketas lülitab jaotusliugkontaktide kaudu sisse ajami elektrimootorid ja mänguasja pirnid järgmiselt: "Edasi" asendis on kontaktid 1, 2, 3, 4 suletud, samas kui mootorid M1 ja M2 on sisse lülitatud, samuti pirnid H1, H2, NC, H4. Paremas asendis on kontaktid 1, 2 suletud, samal ajal kui M1 mootor ja NC-lamp on sisse lülitatud. Peatusasendis on kõik kontaktid avatud. "Vasakpoolses" asendis on kontaktid 1, 3 suletud, samal ajal kui mootor M2 ja lambipirn H4 on sisse lülitatud. Meeskonnad vahetuvad perioodiliselt. Diagramm näitab käskude jada ühes tsüklis. Süsteemi paigaldamise ja kasutuselevõtu juhised Soovitav on asetada vastuvõtja mänguasja e-kirjast maksimaalsele kaugusele. mootorid ja elektromagnetid. Vastuvõtja kaitsmiseks elektrimootoritest põhjustatud häirete eest on soovitatav ühendada elektrimootoritega paralleelselt elektrolüütkondensaatorid 10-20 mikrofaradi tööpingega 10-12 volti, jälgides ühenduse polaarsust. Vastuvõtjaga peab olema ühendatud antenn. Antendina võib kasutada 1,0-2,0 mm läbimõõduga tihvti või traati pikkusega vähemalt 20 cm Antenn peab olema mänguasja korpusest isoleeritud. Isolaatoritena võib kasutada keraamikast, fluoroplastist, pleksiklaasist või polüstüreenist valmistatud detaile. Antenni pikkuse suurenemisega suureneb juhtimisulatus. Vastuvõtja peab olema kaetud isolatsioonimaterjaliga, et kaitsta seda tolmu ja niiskuse eest. Kaugus trükkplaadist aluseni, millele vastuvõtja on paigaldatud, peab olema vähemalt 5 mm.
Elementide asukoht trükkplaadil on näidatud joonisel 5. Pärast elektriahela paigaldamist ja jõudluse kontrollimist (lülitusjärjekord on näidatud allpool) on vaja vastuvõtja reguleerida maksimaalsele tundlikkusele. Reguleerimine toimub kondensaatori C4 abil (vt. elektriskeem ja vastuvõtja joonis). Pöörates kondensaatori rootorit isoleeriva kruvikeerajaga, tuleb mänguasja saatja küljest võimalikult kaugele eemaldamisel leida asend, kus relee aktiveerub. Käsuseade kinnitatakse käppade abil horisontaalsele platvormile.
Edu kõigile, kolm kuud tagasi - istudes "posti ru vastuste peal" leidsin küsimuse: http://otvet.mail.ru/question/92397727, pärast minu antud vastust alustas küsimuse autor mulle isiklikult kirjutada, kirjavahetusest sai teada, et Tov. "Ivan Ruzhitsky" ehk "STAWR" ehitab võimalusel r/a masinat ilma "kallite" tehase rauatükkideta.
Ostust olid tal kaasas 433 MHz RF-moodulid ja raadiokomponentide "ämber".
Asi pole selles, et ma selle ideega "haigeks jäin", kuid sellegipoolest hakkasin mõtlema selle projekti elluviimise võimalusele tehnilisest küljest.
Olin tol ajal juba üsna hästi kursis raadiojuhtimise teooriaga (arvan küll), lisaks; mõned arendused olid juba kasutusel.
Noh, huvilistele - administratsioon mõtles välja nupu ......
Niisiis:
Kõik sõlmed tehti vastavalt "põlvele", "ilu" polnud, peamine ülesanne on välja selgitada, kui palju see projekt on teostatav ja kui palju see rublades ja tööjõus "välja läheb".
Kaugjuhtimispult:
Ma ei teinud isetehtud saatjat kahel põhjusel:
1. Ivanil on see juba olemas.
2. Korra proovisin 27 MHz üles segada - sellest ei tulnud midagi head.
Kuna juhtimine pidi olema proportsionaalne, siis kõik puldid Hiina prügikastist kukkusid ise minema.
Võtsin kodeerimisskeemi (kanalikodeerija) sellelt saidilt: http://ivan.bmstu.ru/avia_site/r_main/HWR/TX/CODERS/3/index.html
Suur tänu autoritele, just selle seadme tõttu pidin õppima MK-d “vilkuma”.
Ostsin saatja ja vastuvõtja siitsamast "Pargist", kuigi sagedusel 315 MHz, valisin lihtsalt odavama:
Kodeerijaga saidil on kõik, mida vajate - vooluahel ise, trükkplaat"raua alla" ja terve hunnik erinevate kuludega püsivara.
Puldi korpus on joodetud klaaskiust, pulgad võtsin kopteri puldist IR-puldil, arvuti mängupuldist oli võimalik, aga naine tapaks ära, mängib sellel DmC-d, Akupesa samast Pult.
Vastuvõtja on olemas, aga selleks, et auto sõidaks, on vaja ka dekoodrit (kanalidekoodrit), nii et ma pidin seda väga kaua otsima - sain isegi Google’i higiseks, noh, nagu öeldakse, “ otsija leiab selle” ja siin see on: http://homepages .paradise.net.nz/bhabbott/decoder.html
MK jaoks on ka püsivara.
Regulaator: algselt tegin lihtsama:

Kuid sõita ainult ilma jääta ja see sai valitud: 
Link saidile: http://vrtp.ru/index.php?showtopic=18549&st=600
Samuti on püsivara.
Emaplaatide ja videokaartide mäge murdes ei leitud vajalikke transistore, nimelt ülemise õla (P-kanali) jaoks, seega joodeti H-sild (see on mootorit toitev sõlm) Toshibovi mikroskeemi alusel. videomakist TA7291P,

maksimaalne vool on 1,2A - mis mulle päris hästi sobis (mitte TRAXXAS - mina teen), joonistasin plaadile markeriga 20r, söövitatud raudkloriidiga, joodetud rööbaste poolt. Siin on, mis juhtus.


“Puhast” PPM-i kiirgub eetrisse muidugi, see pole hea, lennukisse ma seda ei pane, aga mänguasja puhul see nii läheb.
Masin võeti tehasest, Hiina vendadelt, kogu hõim peale töötava mootori eemaldati ja meie projekt Ivaniga pannakse oma kohale, kuigi me tegeleme sellega eraldi, see on tema idee!
Kulutatud:
RF-moodulite komplekt - 200 rubla
Kaks MK PIC12F675 - 40 rubla tükk.
Serva - TG9e 75r
+3 õhtul.
Kui teil on küsimusi, vastan hea meelega (ma ei kirjutanud palju)
Lugupidamisega Vassili.
Pärast selle postituse lugemist tuli mul mõte oma lennuki hankimisest. Võtsin valmis joonised, tellisin hiinlastelt mootorid, akud ja propellerid. Kuid otsustasin ise raadiojuhtimise teha, esiteks - see on huvitavam, teiseks - pean end millegagi hõivama, kuni pakend ülejäänud varuosadega läheb, ja kolmandaks - sai võimalikuks olla originaalne ja lisada kõik omamoodi maiuspalad.
Ettevaatust piltidega!
Kuidas ja mida juhtida
Tavalised inimesed võtavad ressiiveri, torkavad sinna sisse servod, kiirusregulaatori, liigutavad puldil kange ja naudivad elu ilma tööpõhimõtteid küsimata ja detailidesse laskumata. Meie puhul see ei toimi. Esimene ülesanne oli välja selgitada, kuidas servosid juhitakse. Kõik osutub üsna lihtsaks, draivil on kolm juhtmest: + toide, - toide ja signaal. Signaalijuhtmel ristkülikukujulised muutuva töötsükliga impulsid. Et mõista, mis see on, vaadake pilti:
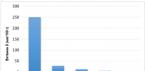
Seega, kui tahame seada ajami äärmisesse vasakpoolsesse asendisse, peame saatma impulsid kestusega 0,9 ms intervalliga 20 ms, kui äärmusse paremale - kestusega 2,1 ms, on intervall sama , noh, keskmised positsioonid on sarnased. Nagu selgus, juhitakse kiiruse regulaatoreid sarnaselt. Need, kes on teemas, ütlevad, et see on tavaline PWM, mida on iga mikrokontrolleri jaoks tühiasi rakendada. Nii otsustasin, ostsin kohalikust poest servo masina ja neetisin selle jaoks leivalauale ATtiny13 nn servotesti. Ja siis selgus, et PWM pole päris lihtne, vaid lõkse. Nagu ülaltoodud diagrammil näha, on töötsükkel (impulsi kestuse ja perioodi kestuse suhe) vahemikus 5% kuni 10% (edaspidi võtan äärmuslikuks impulsse kestusega 1,0 ms ja 2,0 ms positsioonid) 256-kohalise PWM-loenduri ATtiny13 jaoks, vastab see väärtustele vahemikus 25 kuni 50. Kuid tingimusel, et loenduri täitmiseks kulub 20 ms, kuid tegelikult see ei tööta ja sagedusel 9,6 MHz ja eelskaalaja 1024, peate loenduri piirama 187-ga (TOP), sel juhul saame sageduseks 50,134 Hz. Enamikul (kui mitte kõigil) servodel pole täpset tugisageduse generaatorit ja seetõttu võib juhtsignaali sagedus veidi ujuda. Kui loenduri 255 TOP-ist lahkuda, on juhtsignaali sagedus 36,76 Hz - mõnel draivil see töötab (võimalik, et tõrgetega), kuid mitte kõigil. Nüüd on meil 187-kohaline loendur, mille jaoks 5-10% vastab väärtustele vahemikus 10 kuni 20 - ainult 10 väärtust, see osutub veidi diskreetseks. Kui kavatsete kella kiiruse ja eelskaalariga mängida, on siin 8-bitise PWM-i võrdlustabel:

Kuid lõppude lõpuks on enamikul mikrokontrolleritel PWM-i genereerimiseks 16-bitine (või rohkem) taimer. Siin kaob diskreetsuse probleem kohe ja sagedust saab täpselt seadistada. Ma ei maali kaua, annan kohe märgi: 
Ma ei usu, et Hiina servo puhul on 600 ja 1200 väärtuste vahel olulist erinevust, seega võib positsioneerimistäpsuse probleemi lugeda lõpetatuks.
Mitme kanaliga haldus
Ühe servo mõtlesime välja, aga lennuki jaoks on vaja neid vähemalt kolme ja ka kiirusregulaatorit. Otselahendus on võtta nelja kanaliga 16-bitise PWM-i mikrokontroller, kuid selline kontroller on kallis ja võtab suure tõenäosusega plaadil palju ruumi. Teine võimalus on kasutada tarkvara PWM-i, kuid protsessori aja võtmine pole samuti valik. Kui vaadata uuesti signaali diagramme, siis 80% juhtudest see mingit infot ei kanna, seega oleks ratsionaalsem PWM-iga määrata vaid 1-2ms impulss. Miks töötsükkel nii kitsastes piirides muutub, sest lihtsam oleks moodustada ja lugeda impulsse, mille töötsükkel on vähemalt 10-90%? Miks me vajame seda mitteinformatiivset signaali, mis võtab enda alla 80% ajast? Kahtlustasin, et ehk võivad need 80% olla hõivatud teiste täiturmehhanismide impulssidega ja siis jagatakse see signaal mitmeks erinevaks. See tähendab, et 20 ms pikkuse perioodi sisse mahub 10 impulssi kestusega 1-2 ms, siis jagatakse see signaal mingisuguse demultiplekseriga 10 erinevaks, mille perioodi kestus on vaid 20 ms. Niipea kui tehtud, joonistasin PROTEUSes järgmise diagrammi:
Demultiplekseri - 74HC238 - rollis suunatakse mikrokontrolleri väljundist impulsid selle sisendisse E. Need impulsid on PWM perioodiga 2ms (500Hz) ja töötsükkel 50-100%. Igal impulssil on oma töötsükkel, mis näitab iga kanali olekut. Sisendi E signaal näeb välja selline:

Selleks, et 74HC238 teaks, millisele väljundile voolusignaali rakendada, kasutame mikrokontrolleri PORTC-d ja demultiplekseri sisendeid A, B, C. Selle tulemusena saame väljunditest järgmised signaalid:

Väljundsignaalid saadakse õige sagedusega (50Hz) ja töötsükliga (5-10%). Niisiis, peate genereerima PWM-i sagedusega 500 Hz ja täidisega 50-100%, siin on plaat 16-bitise loenduri eelskaalaja ja TOP-i seadistamiseks:

Huvitav on see, et PWM-i väärtuste võimalik arv on täpselt 1000 korda väiksem kui taimeri sagedus.
Tarkvara juurutamine
ATmega8 jaoks, mille taktsagedus on 16 MHz, AtmelStudio6-s rakendatakse kõik järgmiselt: esiteks määratleme servode äärmuslike positsioonide loenduri väärtused:#define LOW 16000U #define HIGH 32000U
seejärel initsialiseerime PWM-generaatori taimer/loendur1:
OCR1A = KÕRGE; //Määrake TOR TCCR1A = 0<
ISR(TIMER1_COMPA_vect) //katkestus ülemise loenduri väärtuse saavutamisel vahetult enne järgmise impulsi algust ( //c_num on muutuja, mis näitab praeguse kanali numbrit, kanalid on kanali väärtuste massiiv, kui (c_num<= 7) { OCR1B = channels; } else { OCR1B = 0; //отключаем ШИМогенератор для несуществующих в демультиплексоре 8 и 9 канала } } ISR(TIMER1_COMPB_vect, ISR_NOBLOCK)// прерывание возникающее в конце импульса { if (c_num <= 7) { PORTC = c_num; //для каналов 0-7 выводим номер канала на PORTC } //и изменяем значение счетчика от 0 до 9 if (c_num >= 9) ( c_num = 0; ) else ( c_num++; ) )
Lubame globaalselt katkestused ja kõik, seades kanalites väärtused LOW-st HIGH-ni, muudame kanalite väärtusi.
Rakendamine riistvaras
Noh, kui teooria on selgeks saanud, on aeg see kõik ellu viia. Süsteemi ajuks valiti ATmega8A mikrokontroller, mille taktsagedus oli kvartsist 16 MHz (mitte sellepärast, et ma tahtsin 16 000 servoasendit, vaid sellepärast, et mul oli selline lamamine). MK juhtsignaal tuleb läbi UART. Tulemuseks on järgmine diagramm:
Mõne aja pärast ilmus see sall:


Kaks kolmekontaktilist pistikut ma ei jootnud, sest mul pole neid vaja ja neid ei joodeta järjest, kuna mul puudub aukude metalliseering ja alumises pistikus sai mõlemal pool roomikud ära vahetada juhtmega, kuid pole probleemi programmiliselt signaali väljastada mis tahes konnektorisse. Puudu on ka 78L05, kuna minu mootoriregulaatoril on sisseehitatud stabilisaator (KAAL).
Andmete vastuvõtmiseks on raadiomoodul HM-R868 ühendatud tahvliga:

Algselt mõtlesin selle otse tahvlisse kleepida, aga lennukisse see disain ei sobinud, pidin seda tegema läbi kaabli. Kui muudate püsivara, saab programmeerimispistiku kontakte kasutada mõne süsteemi (küljetuled jne) sisse- ja väljalülitamiseks.
Tahvel maksis umbes 20 UAH = 2,50 dollarit, vastuvõtja - 30 UAH = 3,75 dollarit.
Edastav osa
Lennukiosa on olemas, jääb üle maapealse tehnikaga tegeleda. Nagu varem mainitud, edastatakse andmeid UART-i kaudu, üks bait kanali kohta. Alguses ühendasin oma süsteemi juhtmega läbi adapteri arvutiga ja saatsin terminali kaudu käsud. Selleks, et dekooder saaks määrata paketi alguse ja edaspidi valida spetsiaalselt talle adresseeritud paketid, saadetakse kõigepealt identifikaatorbait, seejärel 8 baiti, mis määravad kanalite oleku. Hiljem hakkas ta kasutama raadiomooduleid, kui saatja välja lülitati, hakkasid kõik mootorid metsikult tõmblema. Signaali mürast filtreerimiseks saadan kõigi 9 eelneva baidi XOR-i kümnenda baidiga. Aitas, aga nõrgalt lisasin veel ühe baitide vahelise timeouti kontrolli, kui see ületatakse - kogu saatmist ignoreeritakse ja vastuvõtt algab uuesti, oodates identifikaatoribaiti. XOR-vormingus kontrollsumma lisamisega muutus terminalist käskude saatmine stressi tekitavaks, nii et neetisin selle programmi kiiresti liuguritega:
Arv alumises vasakus nurgas on kontrollsumma. Arvuti liugureid liigutades liikusid lennuki roolid! Üldiselt silusin seda kõike ja hakkasin kaugjuhtimispuldi peale mõtlema, ostsin selle jaoks järgmised juhtkangid:
Siis aga tuli mulle üks mõte. Omal ajal tirisin end kõikvõimalikest lennusimulaatoritest: “IL-2 Sturmovik”, “Lock On”, “MSFSX”, “Ka-50 Black Shark” jne. Vastavalt sellele oli mul Genius F-23 juhtkang. ja otsustasin selle liuguritega ülaltoodud programmi külge kruvida. Googeldades, kuidas seda rakendada, leidsin selle postituse ja see toimis! Mulle tundub, et täisväärtusliku juhtkangiga lennukiga lendamine on palju lahedam kui puldil olev väike võlukepp. Üldiselt on esimesel fotol kõik koos näidatud - see on netbook, juhtkang, FT232 muundur ja sellega ühendatud saatja HM-T868. Konverter on ühendatud 2m kaabliga printerist, mis võimaldab paigaldada selle mingi puu vms külge.
Alusta!
Niisiis, on lennuk, on raadiojuhtimine - Lähme!(c) Esimene lend tehti üle asfaldi, tulemuseks on pooleks purunenud kere ja pooleldi rebenenud mootor. Teine lend tehti üle pehmema pinna:Ka järgmised 10 lendu polnud eriti edukad. Peamine põhjus on minu meelest juhtkangi tugev diskreetsus – see andis veeres vaid 16 väärtust (võimaliku 256 asemel), kaldetelje puhul pole parem. Kuid kuna katsete tulemusena sai lennuk oluliselt kahjustatud ja seda ei saa parandada:

- Selle versiooni õigsust pole veel võimalik kontrollida. Seda versiooni toetab ka videole jäädvustatud katse tasandada lennukit – see lendab viltu ja kukub siis järsult kokku vastupidises suunas (ja peakski sujuvalt). Siin on visuaalsem video:
Varustuse ulatus on ca 80m, püüab ka kaugemale, aga igal teisel korral.
Noh, see on kõik, tänan tähelepanu eest. Loodan, et pakutav teave on kellelegi kasulik. Vastan hea meelega kõikidele küsimustele.
Arhiivis Proteuse plaadi skeem ja juhtmestik.
Peamised tehnilised andmed
Raadiojuhtimissüsteem võimaldab mänguasja kaugjuhtida kuni 10 meetri kauguselt.
Saatja töösagedus on 27,12 MHz.
Saatja võimsus jääb 4-10 mW piiresse.
Saatja voolutarve ei ületa 20 mA.
Antenni ja toiteallikaga saatja kaal ei ületa 150 g.
Vastuvõtja tundlikkus töösagedusalas ei ole halvem kui 100 μV.
Vastuvõtja voolutarve ei ületa 20 mA.
Vastuvõtja kaal ei ületa 70 g.
Käsuseade võimaldab täita nelja erinevat käsku, mida perioodiliselt korratakse.
Juhtseadme kaal ei ületa 70 g.
Vastuvõtja ja saatja toiteallikaks on Krona-VTs akud.
Toimimispõhimõte
Saatja koosneb modulaatorist ja kõrgsagedusgeneraatorist (joonis 1). Saatja modulaator on sümmeetriline multivibraator, mis on kokku pandud MP40 tüüpi madalsagedustransistoridele VT2 ja VT3.
Kõrgsagedusgeneraator on monteeritud mahtuvusliku tagasiside ahela järgi transistorile VT1 tüüpi P416. Kui VT2 modulaatori transistor on avatud, sulgub generaatori ahel aku plussi, generaator ergastub töösagedusel, antenn kiirgab kõrgsageduslikku signaali.
Vastuvõtja koosneb kõrgsagedusastmest, madalsagedusvõimendist ja elektroonilisest releest.
Vastuvõtja kõrgsageduslik kaskaad on superregeneraator. Superregeneraator on monteeritud P416 tüüpi kõrgsagedustransistorile VT1 (joonis 2).

Joonis 2
Kui emitteri ahelas C5 R3 pole signaali, täheldatakse summutussageduse võnkumisi. Summutamise sagedus määrab superregeneraatori tundlikkuse selle töösagedusel ja valitakse elementide C5, R3 abil.
Saatja käsusignaali valib L1-C4 ahel, võimendab ja tuvastab superregeneraator. Filter R4-C8 edastab madala sagedusega käsusignaali VT2 võimendi sisendisse, eraldades samal ajal kõrgemat järku summutussageduse.
Elektrooniline relee on kokku pandud MP40 tüüpi transistoridele VT3-VT4 ja VT4 transistori kollektor on ühendatud PCM-1 tüüpi täitevreleega KR.
Käsusignaali madalsageduslikku pinget võimendavad transistorid VT3-VT4 ja see juhitakse läbi kondensaatori C13 alaldi rakku UD1, UDZ.
Takisti R9 kaudu alaldatud pinge antakse transistori VT3 alusele. Sel juhul suureneb transistori VT3 emitteri vool järsult, transistor VT4 avaneb. Relee aktiveeritakse, sulgedes käsuseadme mootori toiteahela.
Käsuseade koosneb elektrimootorist, põrkmehhanismist, programmikettast ja jaotavatest liugkontaktidest. Programmketas, mille külg on džemprite süsteem, lülitab jaotusliugkontaktide kaudu mänguasja ajamimootorite ja muude elektriliste elementide toiteallika.
Raadio teel juhitava mänguasja elektriahela kirjeldus
Diagramm (joonis 3) näitab ühte raadio teel juhitava mänguasja elektriseadmete võimalust.
Mänguasjal on kaks ajamimootorit, mis tagavad edasiliikumise ja pööravad vasakule ja paremale. Mänguasja tagumised lambipirnid toimivad suunatuledena. Kaks esituld loovad mänguasja teed valgustava efekti.

Joonis 3
Saatjalt käsusignaalide vastuvõtmiseks on mänguasja sisse ehitatud vastuvõtja ja käsuseade. Ajami mootor ja käsuseade ning lambipirnid saavad toite kahest järjestikku ühendatud 3336L (U) (GB1) tüüpi akust. Vastuvõtja toiteallikaks on aku "Krona-VTs" (GB2). Aku väljalülitamiseks kasutatakse kahepooluselist lülitit S. Käsusignaali vastuvõtmisel saatjalt, releelt KR, aktiveerub vastuvõtja ja lülitab oma kontaktidega sisse käsuseadme elektrimootori (joon. 4) MZ.

Joonis 4. Käsuseade
MZ elektrimootor, kasutades põrkmehhanismi, pöörab programmiketast 30 ° võrra, mis vastab ühe käsu ümberlülitamisele.
Programmketas lülitab jaotus-libistades kontaktide kaudu sisse ajami elektrimootorid ja mänguasja lambipirnid järgmiselt:
"Edasi" asendis on kontaktid 1, 2, 3, 4 suletud, samal ajal kui mootorid M1 ja M2, samuti pirnid H1, H2, NC, H4 on sisse lülitatud.
"Paremas" asendis on kontaktid 1, 2 suletud, samal ajal kui M1 mootor ja NC-lamp on sisse lülitatud.
"Stopp" asendis on kõik kontaktid avatud.
"Vasakpoolses" asendis on kontaktid 1, 3 suletud, samal ajal kui mootor M2 ja lambipirn H4 on sisse lülitatud.
Meeskonnad vahetuvad perioodiliselt. Diagramm näitab käskude jada ühes tsüklis.
Süsteemi paigaldamise ja kasutuselevõtu juhised
Soovitav on asetada vastuvõtja mänguasja e-kirjast maksimaalsele kaugusele. mootorid ja elektromagnetid. Vastuvõtja kaitsmiseks elektrimootoritest põhjustatud häirete eest on soovitatav ühendada elektrimootoritega paralleelselt elektrolüütkondensaatorid 10-20 mikrofaradi tööpingega 10-12 volti, jälgides ühenduse polaarsust. Vastuvõtjaga peab olema ühendatud antenn. Antendina võib kasutada 1,0-2,0 mm läbimõõduga tihvti või traati pikkusega vähemalt 20 cm Antenn peab olema mänguasja korpusest isoleeritud. Isolaatoritena võib kasutada keraamikast, fluoroplastist, pleksiklaasist või polüstüreenist valmistatud detaile. Antenni pikkuse suurenemisega suureneb juhtimisulatus. Vastuvõtja peab olema kaetud isolatsioonimaterjaliga, et kaitsta seda tolmu ja niiskuse eest. Kaugus trükkplaadist aluseni, millele vastuvõtja on paigaldatud, peab olema vähemalt 5 mm.
Elementide asukoht trükkplaadil on näidatud joonisel 5.
Pärast elektriahela paigaldamist ja jõudluse kontrollimist (lülitusjärjekord on näidatud allpool) on vaja vastuvõtja reguleerida maksimaalsele tundlikkusele. Reguleerimine toimub kondensaatori C4 abil (vt vastuvõtja skeemi ja joonist). Pöörates kondensaatori rootorit isoleeriva kruvikeerajaga, tuleb mänguasja saatja küljest võimalikult kaugele eemaldamisel leida asend, kus relee aktiveerub.
Käsuseade kinnitatakse käppade abil horisontaalsele platvormile.
Raadioelementide loend
| Määramine | Tüüp | Denominatsioon | Kogus | Märge | Pood | Minu märkmik | |
|---|---|---|---|---|---|---|---|
| 1. pilt. | |||||||
| VT1 | bipolaarne transistor | P416 | 1 | Märkmikusse | |||
| VT2, VT3 | bipolaarne transistor | MP40 | 2 | Märkmikusse | |||
| C1 | Kondensaator | 24 pF | 1 | Märkmikusse | |||
| C2 | Kondensaator | 56 pF | 1 | Märkmikusse | |||
| C3 | Trimmeri kondensaator | 4-15 pF | 1 | Märkmikusse | |||
| C4, C7 | Kondensaator | 3300 pF | 2 | Märkmikusse | |||
| C5 | Kondensaator | 75 pF | 1 | Märkmikusse | |||
| C6 | Kondensaator | 30 pF | 1 | Märkmikusse | |||
| C8, C9 | Kondensaator | 0,05 uF | 2 | Märkmikusse | |||
| R1, R4, R5 | Takisti | 22 kOhm | 3 | Märkmikusse | |||
| R2 | Takisti | 15 kOhm | 1 | Märkmikusse | |||
| R3 | Takisti | 75 oomi | 1 | Märkmikusse | |||
| R6 | Takisti | 3 kOhm | 1 | Märkmikusse | |||
| L1, L2 | Induktiivpool | 2 | Märkmikusse | ||||
| S | Taktinupp | 1 | Märkmikusse | ||||
| XS | Antenni pistik | 1 | Märkmikusse | ||||
| HT | Pistik aku ühendamiseks "Krona" | 1 | Märkmikusse | ||||
| GB | Aku võimsus | "Krona-VC" 9 volti | 1 | Või sarnased | Märkmikusse | ||
| Joonis 2. | |||||||
| VT1 | bipolaarne transistor | P416 | 1 | Märkmikusse | |||
| VT2-VT4 | bipolaarne transistor | MP40 | 3 | Märkmikusse | |||
| VD1, VD3 | Diood | D9V | 2 | Märkmikusse | |||
| VD2, VD4 | Diood | KD103A | 2 | Märkmikusse | |||
| C1 | Kondensaator | 5,6 pF | 1 | Märkmikusse | |||
| C2, C8, C13 | Kondensaator | 0,047 uF | 3 | Märkmikusse | |||
| C3, C9, C15 | 20 uF | 3 | Märkmikusse | ||||
| C4, C7 | Trimmeri kondensaator | 6-25 pF | 2 | Märkmikusse | |||
| C5 | Kondensaator | 2200 pF | 1 | Märkmikusse | |||
| C6 | Kondensaator | 24 pF | 1 | Märkmikusse | |||
| C10 | elektrolüütkondensaator | 5 uF | 1 | Märkmikusse | |||
| C11 | Kondensaator | 5 uF | 1 | Märkmikusse | |||
| C12 | Kondensaator | 1000 pF | 1 | Märkmikusse | |||
| C14 | elektrolüütkondensaator | 10 uF | 1 | Märkmikusse | |||
| R1 | Takisti | 22 kOhm | 1 | Märkmikusse | |||
| R2, R4, R10 | Takisti | 10 kOhm | 3 | Märkmikusse | |||
| R3, R7, R8 | Takisti | 4,7 kOhm | 3 | Märkmikusse | |||
| R5, R9 | Takisti | 6,8 kOhm | 2 | ||||
Erinevate mudelite ja mänguasjade raadiojuhtimiseks saab kasutada diskreetseid ja proportsionaalseid seadmeid. Peamine erinevus proportsionaalse ja diskreetse varustuse vahel on see, et see võimaldab operaatori käsul suunata mudeli tüürid mis tahes vajaliku nurga alla ning sujuvalt muuta selle liikumise kiirust ja suunda, "Edasi" või "Tagasi". Proportsionaalse tegevuse seadmete ehitamine ja reguleerimine on üsna keeruline ja. mitte alati algajale raadioamatöörile jõukohane. Kuigi diskreetsete tegevusseadmete võimalused on piiratud, saate neid spetsiaalseid tehnilisi lahendusi kasutades laiendada. Seetõttu kaalume edaspidi ühe käsuga juhtimisseadmeid, mis sobivad ratastega, lendavate ja ujuvate mudelitega.
Raadio teel juhitav saatja.
Mudelite juhtimiseks 500 m raadiuses, nagu kogemus näitab, piisab umbes 100 mW väljundvõimsusega saatjast. Raadio teel juhitavate mudelite saatjad töötavad reeglina vahemikus 10 m. Mudeli ühe käsuga juhtimine toimub järgmiselt. Juhtkäsu andmisel kiirgab saatja kõrgsageduslikke elektromagnetilisi võnkumisi ehk teisisõnu genereerib ühe kandesageduse Mudelil paiknev vastuvõtja võtab vastu saatja poolt saadetud signaali, mille tulemusel täiturmehhanism käivitub. Selle tulemusena muudab mudel käsklusele alludes liikumissuunda või täidab ühe juhise, mis on eelnevalt mudeli kujundusse sisse ehitatud. Ühe käsuga juhtimismudelit kasutades saate panna mudeli tegema üsna keerulisi liigutusi. Ühe käsuga saatja skeem on näidatud joonisel fig. 22.4. Saatja sisaldab kõrgsageduslikku põhiostsillaatorit ja modulaatorit. Peaostsillaator on monteeritud transistorile VT1, vastavalt mahtuvuslikule kolmepunktilisele skeemile. Saatja L2..C2 ahel on häälestatud sagedusele 27,12 MHz, mis on Riigi Tpoolt määratud mudelite raadiojuhtimiseks. Alalisvoolu generaatori töörežiim määratakse takisti R1 takistuse väärtuse valikuga. Generaatori tekitatud kõrgsageduslikud võnked kiirgatakse kosmosesse antenni abil, mis on ahelaga ühendatud läbi sobiva induktiivpooli L1. Modulaator on valmistatud kahel transistoril VT1, VT2 ja on sümmeetriline multivibraator. Moduleeritud pinge eemaldatakse transistori VT2 kollektori koormuselt R4 ja juhitakse kõrgsagedusgeneraatori transistori VT1 ühisesse toiteahelasse, mis tagab 100% modulatsiooni. Saatjat juhitakse ühises toiteahelas oleva SB1 nupuga. Peaostsillaator ei tööta pidevalt, vaid ainult siis, kui vajutatakse nuppu SB1, kui ilmuvad vooluimpulsid, mis on genereeritud multivibrato-
Riis. 22.4. Raadio teel juhitava mudelisaatja skemaatiline diagramm
rumm. Peaostsillaatori tekitatud kõrgsageduslikud võnked saadetakse antennile eraldi portsjonitena, mille kordussagedus vastab modulaatori impulsisagedusele.
Saatja kasutab transistore, mille baasvoolu ülekandetegur on vähemalt 60. Takistid MLT-0,125 tüüpi, kondensaatorid-K10-7, KM-6. Sobival antennimähisel L1 on 12 pööret PEV-1 0,4 ja see on keritud ühtsele raamile taskuressiiverilt, millel on 2,8 mm läbimõõduga kaubamärgi 100NN ferriitsüdamik. L2 mähis on raamita ja sisaldab 16 keerdu PEV-1 0,8 traati, mis on keritud 10 mm läbimõõduga tornile. Juhtnupuna saate kasutada MP-7 tüüpi mikrolülitit. Saatja osad on paigaldatud fooliumklaaskiust valmistatud trükkplaadile. Saatja antenn on 0 1 ... 2 mm ja umbes 60 cm pikkune terasest elastne traat, mis on ühendatud otse trükkplaadil asuvasse XI pistikupessa. Kõik saatja osad peavad olema suletud alumiiniumkorpusesse. Juhtnupp asub korpuse esipaneelil. Kohta, kus antenn läbib korpuse seina pistikupessa XI, tuleb paigaldada plastikust isolaator, et vältida antenni korpust puudutamist.
Teadaolevalt heade osade ja õige paigalduse korral ei vaja saatja erilist reguleerimist. Tuleb vaid veenduda, et see töötab ja muutes mähise L1 induktiivsust, saavutada saatja maksimaalne võimsus. Multivibraatori töö kontrollimiseks peate VT2 kollektori ja toiteallika plussi vahel sisse lülitama suure takistusega kõrvaklapid. Kui SB1 nupp on suletud, peaks kõrvaklappidest kostma multivibraatori sagedusele vastav madal heli. RF-generaatori töövõime kontrollimiseks on vaja lainemõõtur kokku panna vastavalt joonisel fig. 22.5. Vooluahel on lihtne detektorvastuvõtja, milles mähis L1 on keritud traadiga PEV-1 1 ... 1,2 ja sisaldab 10 pööret kraaniga alates 3 pöördest. Mähis on keritud 4 mm sammuga plastikraamile Ø 25 mm. Indikaatorina kasutatakse suhtelise sisendtakistusega alalisvoolu voltmeetrit. 
Riis. 22.5. Lainemeetri skemaatiline diagramm saatja häälestamiseks
10 kOhm/V või mikroampermeeter voolutugevusele 50...100 µA. Lainemõõtur on kokku pandud väikesele 1,5 mm paksusele klaaskiudplaadile. Lülitades saatja sisse, aseta lainemeeter sellest 50...60 cm kaugusele. Töötava RF-generaatori korral kaldub lainemeetri nõel nullmärgist teatud nurga võrra kõrvale. Häälestades raadiosagedusgeneraatori sagedusele 27,12 MHz, nihutades ja laiendades L2 mähise pöördeid, saavutatakse voltmeetri nõela maksimaalne hälve. Antenni kiirgavate kõrgsageduslike võnkumiste maksimaalne võimsus saadakse pooli L1 südamiku pööramisel. Saatja häälestus loetakse lõpetatuks, kui saatjast 1 ... 1,2 m kaugusel olev lainemeetri voltmeeter näitab pinget vähemalt 0,05 V.
RC mudeli vastuvõtja.
Mudeli juhtimiseks kasutavad raadioamatöörid üsna sageli superregeneraatori skeemi järgi ehitatud vastuvõtjaid. Selle põhjuseks on asjaolu, et lihtsa konstruktsiooniga üliregeneratiivne vastuvõtja on väga kõrge tundlikkusega, suurusjärgus 10...20 µV. Mudeli superregeneratiivse vastuvõtja skeem on näidatud joonisel fig. 22.6. Vastuvõtja on kokku pandud kolmele transistorile ja toiteallikaks on Krona aku või mõni muu 9V allikas. Vastuvõtja esimene etapp on isekustutav superregeneratiivne detektor, mis on valmistatud transistoril VT1. Kui antenn ei saa signaali, genereerib see aste kõrgsageduslike võnkumiste impulsse, mis järgnevad sagedusega 60 ... 100 kHz. See on summutussagedus, mille seadistavad kondensaator C6 ja takisti R3. võita sind - 
Riis. 22.6. Superregeneratiivse raadio teel juhitava mudeli vastuvõtja skemaatiline diagramm
Vastuvõtja superregeneratiivse detektori poolt jagatud käsusignaali eraldumine toimub järgmiselt. Transistor VT1 on ühendatud vastavalt ühisele baasahelale ja selle kollektori vool pulseerib summutussagedusega. Kui vastuvõtja sisendis pole signaali, tuvastatakse need impulsid ja tekitavad takistile R3 teatud pinge. Hetkel, mil signaal saabub vastuvõtjasse, pikeneb üksikute impulsside kestus, mis toob kaasa takisti R3 pinge tõusu. Vastuvõtjal on üks sisendahel LI, C4, mis on mähise südamiku L1 abil häälestatud saatja sagedusele. Ahela ühendus antenniga on mahtuvuslik. Vastuvõtja poolt vastuvõetud juhtsignaal eraldatakse takistile R4. See signaal on 10...30 korda väiksem kui summutussageduse pinge. Häirepinge summutamiseks summutussagedusega ühendatakse üliregeneratiivse detektori ja pingevõimendi vahele filter L3, C7. Samas on filtri väljundis kustutussageduse pinge 5...10 korda väiksem kasuliku signaali amplituudist. Tuvastatud signaal juhitakse läbi eralduskondensaatori C8 transistori VT2 alusele, mis on madalsagedusvõimendusaste, ja seejärel transistorile VT3 ja dioodidele VD1, VD2 kokku pandud elektroonilisele releele. Transistori VT3 poolt võimendatud signaali alaldatakse dioodidega VD1 ja VD2. Alaldatud vool (negatiivne polaarsus) juhitakse transistori VT3 alusele. Kui elektroonilise relee sisendisse ilmub vool, suureneb transistori kollektori vool ja relee K1 aktiveerub. Vastuvõtja antennina saate kasutada tihvti pikkusega 70 ... 100 cm Superregeneratiivse vastuvõtja maksimaalne tundlikkus määratakse takisti R1 takistuse valimisel.
Vastuvõtja paigaldatakse trükkimise teel klaaskiust fooliumplaadile paksusega 1,5 mm ja mõõtmetega 100x65 mm. Vastuvõtja kasutab saatjaga sama tüüpi takisteid ja kondensaatoreid. L1 superregeneraatori ahela mähisel on 8 keerdu PELSHO 0,35 traati, keeratud pöördega polüstüreenist raami sisselülitamiseks Ø 6,5 mm, 100NN kaubamärgi häälestusferriitsüdamikuga läbimõõduga 2,7 mm ja pikkusega 8 mm . Drosselidel on induktiivsus: L2 - 8 μH ja L3 - 0,07 ... 0,1 μH. Elektromagnetrelee K1 tüüp RES-6 mähisega takistusega 200 oomi. Vastuvõtja häälestamine algab superregeneratiivse etapiga. Ühendage suure takistusega kõrvaklapid paralleelselt kondensaatoriga C7 ja lülitage toide sisse. Kõrvaklappidesse ilmunud müra viitab superregeneratiivse detektori õigele tööle. Takisti R1 takistust muutes saavutatakse kõrvaklappides maksimaalne müra. Transistori VT2 pingevõimenduse aste ja elektrooniline relee ei vaja spetsiaalset reguleerimist. Takisti R7 takistuse valimisel saavutatakse vastuvõtja tundlikkus suurusjärgus 20 μV. Vastuvõtja lõplik reguleerimine toimub koos saatjaga Kui ühendada kõrvaklapid paralleelselt relee K1 mähisega ja lülitada saatja sisse, siis peaks kõrvaklappidesse kostma vali müra. Vastuvõtja häälestamisel saatja sagedusele kaob kõrvaklappidest müra ja relee hakkab tööle.