Tehniskie pamatdati Radio vadības sistēma ļauj attālināti vadīt rotaļlietu līdz 10 metru attālumā.
Raidītāja darbības frekvence ir 27,12 MHz.
Raidītāja jauda ir 4-10 mW robežās.
Raidītāja strāvas patēriņš nav lielāks par 20 mA.
Raidītāja svars ar antenu un barošanas avotu ir ne vairāk kā 150 g.
Uztvērēja jutība darba frekvenču joslā nav sliktāka par 100 µV.
Uztvērēja strāvas patēriņš nav lielāks par 20 mA.
Uztvērēja svars ir ne vairāk kā 70 g.
Komandu aparāts nodrošina četru dažādu komandu izpildi, kuras periodiski atkārtojas.
Komandu ierīces svars ir ne vairāk kā 70 g.
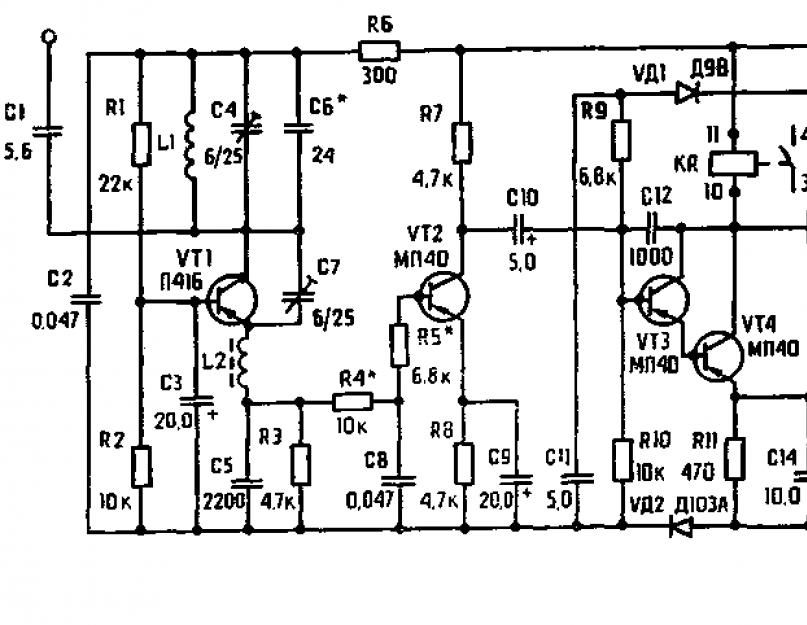
Uztvērēju un raidītāju darbina Krona-VTs baterijas. Darbības princips Raidītājs sastāv no modulatora un augstfrekvences ģeneratora (1. att.). Raidītāja modulators ir simetrisks multivibrators, kas samontēts uz MP40 tipa zemfrekvences tranzistoriem VT2 un VT3.
1. att. Augstfrekvences ģenerators ir samontēts uz P416 tipa tranzistora VT1 saskaņā ar ķēdi ar kapacitatīvo atgriezenisko saiti. Kad modulatora tranzistors VT2 ir atvērts, ģeneratora ķēde tiek aizvērta līdz akumulatora pozitīvajam posmam, ģenerators tiek ierosināts ar darba frekvenci, un antena izstaro augstfrekvences signālu. Uztvērējs sastāv no augstfrekvences posma, zemfrekvences pastiprinātāja un elektroniskā releja. Uztvērēja augstfrekvences posms ir super-reģenerators. Superreģenerators ir samontēts uz augstfrekvences tranzistora VT1 tipa P416 (2. att.). 
2. att. Ja nav signāla uz emitera ķēdes C5 R3, tiek novērotas dzēšanas frekvences svārstības. Dzēšanas frekvence nosaka superreģeneratora jutību tā darbības frekvencē un tiek izvēlēta ar elementiem C5, R3. Raidītāja komandas signālu izolē L1-C4 ķēde, pastiprina un nosaka superreģenerators. Filtrs R4-C8 nodod zemfrekvences komandas signālu uz pastiprinātāja VT2 ieeju, vienlaikus atdalot augstākas kārtas izslēgšanas frekvenci. Elektroniskais relejs ir samontēts uz tranzistoriem VT3-VT4 tipa MP40, un tranzistora VT4 kolektors ir savienots ar izpildreleju KR tipa RSM-1. Komandu signāla zemfrekvences spriegumu pastiprina tranzistori VT3-VT4 un caur kondensatoru C13 piegādā taisngrieža šūnai UD1, UDZ. Rektificētais spriegums caur rezistoru R9 tiek piegādāts tranzistora VT3 pamatnei. Šajā gadījumā tranzistora VT3 emitētāja strāva strauji palielinās, tranzistors VT4 atveras. Relejs tiek aktivizēts, aizverot vadības ierīces motora barošanas ķēdi. Komandierīce sastāv no elektromotora, sprūdrata mehānisma, programmas diska un sadales bīdāmajiem kontaktiem. Programmas disks, kura sānos ir džemperu sistēma, caur sadales bīdāmiem kontaktiem pārslēdz strāvu uz piedziņas motoriem un citiem rotaļlietas elektriskajiem elementiem. Apraksts elektriskā shēma radio vadāma rotaļlieta Diagrammā (3. att.) parādīta viena no radiovadāmās rotaļlietas elektroiekārtu iespējām. Rotaļlietai ir divi piedziņas motori, kas nodrošina kustību uz priekšu un griežas pa kreisi un pa labi. Rotaļlietas aizmugurējās gaismas spuldzes kalpo kā pagrieziena rādītāji. Divi priekšējie lukturi rada rotaļlietas ceļa apgaismojuma efektu. 
3. att. Lai saņemtu komandu signālus no raidītāja, rotaļlietā ir iebūvēts uztvērējs un komandu ierīce. Piedziņas un vadības motoru, kā arī spuldzes darbina divi sērijveidā savienoti 3336L(U) (GB1) tipa akumulatori. Uztvērēju darbina Krona-VTs akumulators (GB2). Lai izslēgtu akumulatoru, izmantojiet divu polu slēdzi S. Kad tiek saņemts komandas signāls no raidītāja, releja KR, uztvērējs tiek aktivizēts un tā kontakti ieslēdz komandu aparāta elektromotoru (4. att.) MZ . 
4. att. Komandu aparāts Elektromotors MZ, izmantojot sprūdrata mehānismu, pagriež programmas disku par 30°, kas atbilst vienas komandas pārslēgšanai. Programmas disks, izmantojot sadales bīdāmos kontaktus, ieslēdz piedziņas motorus un rotaļlietu gaismas šādi: "Uz priekšu" stāvoklī kontakti 1, 2, 3, 4 ir aizvērti, savukārt motori M1 un M2 ir ieslēgti, kā arī spuldzes H1, H2, NC, H4. “Labajā” pozīcijā kontakti 1, 2 ir aizvērti, savukārt M1 motors un NC lampiņa ir ieslēgti. Pozīcijā “Stop” visi kontakti ir atvērti. Pozīcijā “kreisais” kontakti 1, 3 ir aizvērti, savukārt M2 motors un H4 spuldze ir ieslēgti. Komandas periodiski mainās. Diagramma parāda komandu secību vienā ciklā. Sistēmas uzstādīšanas un nodošanas ekspluatācijā instrukcijas Uztvērēju ieteicams rotaļlietā novietot maksimāli tālu no elektriskās sistēmas. motori un elektromagnēti. Lai aizsargātu uztvērēju no elektromotoru radītiem traucējumiem, paralēli elektromotoriem ieteicams pieslēgt 10-20 uF elektrolītiskos kondensatorus ar darba spriegumu 10-12 volti, ievērojot pieslēguma polaritāti. Uztvērējam ir jāpievieno antena. Kā antenu var izmantot tapu vai stiepli, kuras diametrs ir 1,0-2,0 mm un garums vismaz 20 cm.Antenai jābūt izolētai no rotaļlietas korpusa. Kā izolatorus var izmantot detaļas, kas izgatavotas no keramikas, fluoroplastmasas, organiskā stikla vai polistirola. Palielinoties antenas garumam, palielinās vadības diapazons. Uztvērējam jābūt pārklātam ar izolācijas materiāla vāku, lai pasargātu to no putekļiem un mitruma. Attālumam no iespiedshēmas plates līdz pamatnei, uz kuras ir uzstādīts uztvērējs, jābūt vismaz 5 mm.
Elementu izvietojums uz iespiedshēmas plates parādīts 5. att. Pēc elektriskās ķēdes uzstādīšanas un tās funkcionalitātes pārbaudes (pārslēgšanas procedūra ir norādīta zemāk), ir nepieciešams noregulēt uztvērēju uz maksimālo jutību. Regulēšana tiek veikta, izmantojot kondensatoru C4 (sk. shēmas shēmu un uztvērēja zīmējumu). Pagriežot kondensatora rotoru ar izolācijas skrūvgriezi, jums pēc iespējas jāatrod pozīcija, kurā darbojas relejs, kad raidītājs ir noņemts. Komandu ierīce tiek fiksēta uz horizontālas platformas, izmantojot spīles.
Sveiki visiem, pirms trim mēnešiem - sēžot “uz atbildēm uz e-pastu ru”, es saskāros ar jautājumu: http://otvet.mail.ru/question/92397727, pēc manis sniegtās atbildes jautājuma autors sāka rakstiet man personīgā ziņā, no sarakstes kļuva zināms, ka biedrs “Ivans Ružitskis”, pazīstams arī kā “STAWR”, konstruē tālvadības automašīnu, kad vien iespējams, bez “dārgas” rūpnīcas aparatūras.
No tā, ko viņš iegādājās, viņam bija RF moduļi ar frekvenci 433 MHz un radio komponentu "spainis".
Nebiju gluži “slims” ar šo ideju, bet tomēr sāku domāt par iespēju realizēt šo projektu no tehniskās puses.
Toreiz jau diezgan labi orientējos radiovadības teorijā (man tā arī liekas), turklāt; daži uzlabojumi jau tika izmantoti.
Nu interesentiem - Administrācija izdomāja pogu......
Tātad:
Visi mezgli tika izgatavoti “uz ceļa”, tāpēc nav “skaistuma”, galvenais uzdevums ir noskaidrot, cik šis projekts ir realizējams un cik tas “iznāks” rubļos un dzemdībās.
TĀLVADĪBAS PULTS:
Es neizgatavoju paštaisītu raidītāju divu iemeslu dēļ:
1. Ivanam tas jau ir.
2. Vienreiz mēģināju uzmaisīt 27 MHz - nekas labs nesanāca.
Tā kā vadība bija paredzēta proporcionālai, tad no ķīniešu atkritumiem visādas pultis pazuda pašas.
Es paņēmu kodētāja shēmu (kanāla kodētāju) no šīs vietnes: http://ivan.bmstu.ru/avia_site/r_main/HWR/TX/CODERS/3/index.html
Liels paldies autoriem, tieši šīs ierīces dēļ man bija jāiemācās “zibināt” MK.
Es nopirku raidītāju un uztvērēju turpat Parkā, lai gan pie 315 MHz es tikai izvēlējos lētāko:
Vietnē ar kodētāju ir viss nepieciešamais - pati ķēde, iespiedshēmas plate“zem dzelzs” un vesela virkne programmaparatūras ar dažādām izmaksām.
Pults korpuss ir pielodēts no stikla šķiedras, nūjas ņemtas no helikoptera pults ar IR vadību, varēja arī no datorspēļu pults, bet sieva mani nogalina, spēlē “DmC” uz tā, baterija nodalījums ir no tās pašas tālvadības pults.
Ir uztvērējs, bet, lai mašīna kustētos, vajag arī dekoderu (kanālu dekodētāju), tāpēc nācās ļoti ilgi meklēt - pat gūgle svīda, nu kā saka “lai meklētājs atrod” un šeit tas ir: http://homepages .paradise.net.nz/bhabbott/decoder.html
Ir arī MK programmaparatūra.
Regulators: Sākumā es izveidoju vienkāršāku:

Bet braukšana tikai priekšā nav ledus un izvēlējās šis: 
Saite uz vietni: http://vrtp.ru/index.php?showtopic=18549&st=600
Tur ir arī programmaparatūra.
Es pārmeklēju mātesplates un video karšu kalnu un neatradu nepieciešamos tranzistorus, proti, augšdelmam (P-kanāls), tāpēc H tilts (šī ir iekārta, kas darbina motoru) tika pielodēta, pamatojoties uz Toshiba mikroshēma no videoreģistratora “TA7291P”,

maksimālā strāva 1,2A - kas man tīri labi derēja (ne TRAXXAS - es tā daru), uzzīmēju dēli ar marķieri par 20 rubļiem, iegravēju ar dzelzs hlorīdu, lodēju no sliežu malas. Tā tas notika.


“Pure” PRM izdalās gaisā, protams, tas nav labi, es to nelikšu lidmašīnā, bet rotaļlietai tas derēs.
Mašīna tika paņemta no rūpnīcas, no brāļiem ķīniešiem, tika noņemta visa tribīne, izņemot darbojošos motoru, un tās vietā viņi ielika manu un Ivana projektu, lai gan mēs ar to nodarbojamies atsevišķi, tā bija viņa ideja!
Iztērēts:
RF moduļu komplekts – 200 RUR
Divi PIC12F675 MK - katrs 40 rubļi.
Serva - TG9e 75r
+15:00.
Ja jums ir kādi jautājumi, es labprāt atbildēšu (es nerakstīju par daudzām lietām)
Ar cieņu, Vasilijs.
Pēc šī ieraksta izlasīšanas mani iedvesmoja arī ideja par savas lidmašīnas kniedēšanu. Paņēmu gatavus rasējumus un pasūtīju no ķīniešiem motorus, akumulatorus un propellerus. Bet radio pulti nolēmu uztaisīt pats, pirmkārt - tā ir interesantāk, otrkārt - vajag ar kaut ko nodarboties, kamēr paka ar pārējām rezerves daļām ir ceļā, treškārt - ir iespēja būt oriģinālam. un pievieno visādus labumus.
Uzmanies no bildēm!
Kā un ko pārvaldīt
Normāli cilvēki paņem uztvērēju, pieslēdz servo un ātruma regulatoru, kustina pults sviras un bauda dzīvi, nebrīnoties par darbības principiem un neiedziļinoties detaļās. Mūsu gadījumā tas nedarbosies. Pirmais uzdevums bija noskaidrot, kā tiek vadīti servo. Viss izrādās diezgan vienkārši, diskam ir trīs vadi: + jauda, - jauda un signāls. Uz signāla vada ir mainīga darba cikla taisnstūrveida impulsi. Lai saprastu, kas tas ir, skatiet attēlu:
Tātad, ja mēs vēlamies iestatīt piedziņu galējā kreisajā pozīcijā, mums ir jānosūta impulsi ar ilgumu 0,9 ms ar intervālu 20 ms, ja galēji pa labi - ar ilgumu 2,1 ms, intervāls ir tāds pats. , nu ar vidējām pozīcijām ir tāpat. Kā izrādās, ātruma regulatori tiek vadīti līdzīgi. Tie, kas ir tēmā, teiks, ka tas ir parasts PWM, kuru var ieviest uz jebkura mikrokontrollera - sīkums. Tāpēc es tā nolēmu, nopirku servo mašīnu vietējā veikalā un kniedēju tai tā saukto ATtiny13 servo testeri uz maizes dēļa. Un tad izrādījās, ka PWM nav gluži vienkāršs, bet tajā ir nepilnības. Kā redzams no iepriekš esošās diagrammas, darba cikls (impulsa ilguma attiecība pret perioda ilgumu) ir no 5% līdz 10% (turpmāk kā galējās pozīcijas ņemu impulsus ar ilgumu 1,0 ms un 2,0 ms). ) 256 ciparu PWM skaitītājam ATtiny13 tas atbilst vērtībām no 25 līdz 50. Bet tas ir ar nosacījumu, ka skaitītāja aizpildīšana prasīs 20 ms, taču patiesībā tas nedarbosies, un frekvencei 9,6 MHz un priekšskalotājs 1024, mums jāierobežo skaitītājs līdz vērtībai 187 (TOR), tādā gadījumā mēs iegūsim frekvenci 50,134 Hz. Lielākajai daļai (ja ne visiem) servo nav precīza atsauces frekvences ģeneratora, un tāpēc vadības signāla frekvence var nedaudz svārstīties. Ja atstājat skaitītāja TOP uz 255, tad vadības signāla frekvence būs 36,76 Hz - tas darbosies uz dažiem diskdziņiem (iespējams, ar kļūmēm), bet ne uz visiem. Tātad, tagad mums ir 187 ciparu skaitītājs, kuram 5-10% atbilst vērtībām no 10 līdz 20 - kopā 10 vērtības, tas būs nedaudz diskrēts. Ja domājat spēlēt ar pulksteņa frekvenci un priekšskalotāju, zemāk ir 8 bitu PWM salīdzināšanas tabula:

Bet lielākajai daļai mikrokontrolleru ir 16 bitu (vai vairāk) taimeris PWM ģenerēšanai. Šeit diskrētuma problēma nekavējoties pazudīs, un frekvenci var precīzi iestatīt. Es to ilgi neaprakstīšu, es jums tūlīt došu zīmi: 
Es nedomāju, ka ķīniešu servo ir būtiska atšķirība starp 600 un 1200 vērtībām, tāpēc problēmu ar pozicionēšanas precizitāti var uzskatīt par slēgtu.
Daudzkanālu vadība
Esam sakārtojuši vienu servo, bet lidmašīnai vajag vismaz trīs un arī ātruma regulatoru. Vienkāršs risinājums ir ņemt mikrokontrolleri ar četriem 16 bitu PWM kanāliem, taču šāds kontrolieris būs dārgs un, visticamāk, aizņems daudz vietas uz plates. Otrā iespēja ir izmantot programmatūras PWM, taču arī nav iespējams aizņemt CPU laiku. Ja vēlreiz paskatās uz signālu diagrammām, 80% gadījumu tas nenes nekādu informāciju, tāpēc racionālāk būtu iestatīt tikai pašu impulsu uz 1-2 ms, izmantojot PWM. Kāpēc darba cikls mainās tik šaurās robežās, jo būtu vieglāk ģenerēt un nolasīt impulsus ar vismaz 10–90% darba ciklu? Kāpēc mums ir vajadzīgs šis neinformatīvais signāls, kas aizņem 80% laika? Man bija aizdomas, ka varbūt šos 80% varētu aizņemt impulsi citiem izpildmehānismiem, un tad šis signāls tiek sadalīts vairākos dažādos. Tas ir, 20 ms periodā var ietilpt 10 impulsi ar ilgumu 1-2 ms, tad šo signālu kāds demultiplekseris sadala 10 dažādos ar perioda ilgumu tikai 20 ms. Tikko pateikts, kā izdarīts, es PROTEUS uzzīmēju šādu diagrammu:
74HC238 darbojas kā demultiplekseris; impulsi no mikrokontrollera izejas tiek piegādāti tā ieejai E. Šie impulsi ir PWM ar periodu 2ms (500Hz) un darba ciklu 50-100%. Katram impulsam ir savs darba cikls, kas norāda katra kanāla stāvokli. Šādi izskatās signāls ieejā E:

Lai 74HC238 zinātu, uz kuru izeju nosūtīt strāvas signālu, mēs izmantojam mikrokontrollera PORTC un demultipleksera ieejas A, B, C. Rezultātā mēs izejās saņemam šādus signālus:

Izejas signāli tiek iegūti pareizā frekvencē (50Hz) un darba ciklā (5-10%). Tātad, jums ir jāģenerē PWM ar frekvenci 500 Hz un piepildījumu 50–100%, šeit ir tabula 16 bitu skaitītāja priekšskalera un TOP iestatīšanai:

Interesanti, ka iespējamais PWM vērtību skaits ir tieši 1000 reižu mazāks par taimera frekvenci.
Programmatūras ieviešana
ATmega8 ar takts frekvenci 16 MHz AtmelStudio6 viss tiek īstenots šādi: pirmkārt, mēs definējam skaitītāju vērtības servo galējām pozīcijām:#define LOW 16000U #define HIGH 32000U
tad mēs inicializējam PWM ģeneratoru uz taimera/skaitītāja1:
OCR1A = AUGSTS; //Iestatīt TOP TCCR1A = 0<
ISR(TIMER1_COMPA_vect) //pārtraukums, kad tiek sasniegta skaitītāja augšējā vērtība, tieši pirms nākamā impulsa sākuma ( //c_num ir mainīgais, kas norāda pašreizējā kanāla numuru, kanāli ir kanālu vērtību masīvs, ja (c_num<= 7) { OCR1B = channels; } else { OCR1B = 0; //отключаем ШИМогенератор для несуществующих в демультиплексоре 8 и 9 канала } } ISR(TIMER1_COMPB_vect, ISR_NOBLOCK)// прерывание возникающее в конце импульса { if (c_num <= 7) { PORTC = c_num; //для каналов 0-7 выводим номер канала на PORTC } //и изменяем значение счетчика от 0 до 9 if (c_num >= 9) ( c_num = 0; ) else ( c_num++; ) )
Globāli iespējojiet pārtraukumus, un esat pabeidzis, kanālos ievadot vērtības no LOW līdz HIGH un mainot vērtības kanālos.
Ieviešana aparatūrā
Nu, mēs esam sakārtojuši teoriju, ir pienācis laiks to visu īstenot. Par sistēmas smadzenēm tika izvēlēts ATmega8A mikrokontrolleris, kura takts frekvence ir 16 MHz (nevis tāpēc, ka es gribēju 16 000 servo pozīciju, bet gan tāpēc, ka man bija daži no tiem, kas gulēja apkārt). MK vadības signāls tiks uztverts, izmantojot UART. Rezultāts ir šāda diagramma:
Pēc kāda laika parādījās šī šalle:


Es nelodēju divus trīs kontaktu savienotājus, jo man tie nav vajadzīgi, un tie nav lodēti pēc kārtas, jo man nav metalizētu caurumu, un apakšējā savienotājā sliedes abās pusēs varēja aizstāt ar vads, taču programmatūrā nav problēmu izvadīt signālu uz jebkuru savienotāju. Trūkst arī 78L05, jo manam dzinēja regulatoram ir iebūvēts stabilizators (WE).
Lai saņemtu datus, HM-R868 radio modulis ir pievienots platei:

Sākotnēji domāju pieslēgt tieši dēlī, bet lidmašīnā šis dizains nederēja, tas bija jādara caur kabeli. Ja maināt programmaparatūru, programmēšanas savienotāja kontaktus var izmantot, lai iespējotu/atspējotu dažas sistēmas (sānu gaismas utt.)
Dēlis maksāja apmēram 20 UAH = 2,50 USD, uztvērējs - 30 UAH = 3,75 USD.
Pārraides daļa
Lidmašīnas daļa ir, atliek tikt galā ar zemes aprīkojumu. Kā jau rakstīts iepriekš, dati tiek pārsūtīti caur UART, viens baits katrā kanālā. Sākumā es savienoju savu sistēmu ar vadu caur adapteri ar datoru un nosūtīju komandas caur termināli. Lai dekodētājs noteiktu pakas sākumu un turpmāk atlasītu tieši tam adresētas pakas, vispirms tiek nosūtīts identifikatora baits, pēc tam 8 baiti, kas nosaka kanālu stāvokli. Vēlāk sāku lietot radio moduļus; kad raidītājs tika izslēgts, visi motori sāka mežonīgi raustīties. Lai filtrētu signālu no trokšņa, ar desmito baitu es nosūtu XOR no visiem 9 iepriekšējiem baitiem. Tas palīdzēja, bet vāji pievienoju arī taimauta pārbaudi starp baitiem; ja tas tiek pārsniegts, visa sūtīšana tiek ignorēta un saņemšana sākas no jauna, gaidot identifikatora baitu. Pievienojot kontrolsummu XOR formā, komandu nosūtīšana no termināļa kļuva saspringta, tāpēc es ātri kniedēju šo programmu ar slīdņiem:
Cipars apakšējā kreisajā stūrī ir kontrolsumma. Pārvietojot datorā slīdņus, lidmašīnas stūres kustējās! Kopumā es to visu atkļūdoju un sāku domāt par tālvadības pulti, es tam nopirku šīs kursorsviras:
Bet tad man ienāca prātā doma. Savulaik mani piesaistīja visdažādākie lidojumu simulatori: “IL-2 Sturmovik”, “Lock On”, “MSFSX”, “Ka-50 Black Shark” utt. Attiecīgi man bija Genius F-23 kursorsvira un nolēma to pieskrūvēt iepriekš minētajai programmai ar slīdņiem. Pameklēju googlē, kā to īstenot, atradu šo ierakstu un izdevās! Man šķiet, ka vadīt lidmašīnu, izmantojot pilnvērtīgu kursorsviru, ir daudz foršāk, nekā izmantojot mazo nūju uz tālvadības pults. Kopumā pirmajā fotoattēlā viss ir parādīts kopā - tas ir netbook, kursorsvira, FT232 pārveidotājs un tam pievienots HM-T868 raidītājs. Pārveidotājs ir savienots ar 2m kabeli no printera, kas ļauj to uzstādīt uz kāda koka vai tamlīdzīga.
Sākt!
Tātad, ir lidmašīna, ir radio vadība - Ejam!(c) Pirmais lidojums tika veikts pa asfaltu, rezultātā uz pusēm pārlauzta fizelāža un pusizplēsts dzinējs. Otrais lidojums tika veikts pa mīkstāku virsmu:Arī turpmākie 10 lidojumi nebija īpaši veiksmīgi. Manuprāt, galvenais iemesls ir kursorsviras ārkārtējā diskrētība - ripināšanai tā deva tikai 16 vērtības (iespējamo 256 vietā), ar soļa asi nebija labāka. Bet, tā kā pārbaužu rezultātā lidmašīna tika būtiski bojāta un to nevar salabot:

- Pagaidām nav iespējams pārbaudīt šīs versijas patiesumu. Šo versiju atbalsta arī mēģinājums nolīdzināt lidmašīnu, kas ierakstīts video - tā lido sasvērusi, un pēc tam strauji krīt pretējā virzienā (bet tai vajadzētu būt vienmērīgi). Šeit ir vizuālāks video:
Iekārtas darbības diapazons ir aptuveni 80m, ķer arī tālāk, bet ik pa laikam.
Nu, tas arī viss, paldies par uzmanību. Ceru, ka sniegtā informācija kādam noderēs. Labprāt atbildēšu uz visiem jautājumiem.
Arhīvā ir Proteusa tāfeles shēma un izkārtojums.
Tehniskie pamatdati
Radio vadības sistēma ļauj attālināti vadīt rotaļlietu līdz 10 metru attālumā.
Raidītāja darbības frekvence ir 27,12 MHz.
Raidītāja jauda ir 4-10 mW robežās.
Raidītāja strāvas patēriņš nav lielāks par 20 mA.
Raidītāja svars ar antenu un barošanas avotu ir ne vairāk kā 150 g.
Uztvērēja jutība darba frekvenču joslā nav sliktāka par 100 µV.
Uztvērēja strāvas patēriņš nav lielāks par 20 mA.
Uztvērēja svars ir ne vairāk kā 70 g.
Komandu aparāts nodrošina četru dažādu komandu izpildi, kuras periodiski atkārtojas.
Komandu ierīces svars ir ne vairāk kā 70 g.
Uztvērēju un raidītāju darbina Krona-VTs baterijas.
Darbības princips
Raidītājs sastāv no modulatora un augstfrekvences ģeneratora (1. att.). Raidītāja modulators ir simetrisks multivibrators, kas samontēts uz MP40 tipa zemfrekvences tranzistoriem VT2 un VT3.
Augstfrekvences ģenerators ir samontēts uz P416 tipa tranzistora VT1 saskaņā ar ķēdi ar kapacitatīvo atgriezenisko saiti. Kad modulatora tranzistors VT2 ir atvērts, ģeneratora ķēde tiek aizvērta līdz akumulatora pozitīvajam posmam, ģenerators tiek ierosināts ar darba frekvenci, un antena izstaro augstfrekvences signālu.
Uztvērējs sastāv no augstfrekvences posma, zemfrekvences pastiprinātāja un elektroniskā releja.
Uztvērēja augstfrekvences posms ir super-reģenerators. Superreģenerators ir samontēts uz augstfrekvences tranzistora VT1 tipa P416 (2. att.).

2. att
Ja emitētāja ķēdē C5 R3 nav signāla, tiek novērotas dzēšanas frekvences svārstības. Dzēšanas frekvence nosaka superreģeneratora jutību tā darbības frekvencē un tiek izvēlēta ar elementiem C5, R3.
Raidītāja komandas signālu izolē L1-C4 ķēde, pastiprina un nosaka superreģenerators. Filtrs R4-C8 nodod zemfrekvences komandas signālu uz pastiprinātāja VT2 ieeju, vienlaikus atdalot augstākas kārtas izslēgšanas frekvenci.
Elektroniskais relejs ir samontēts uz tranzistoriem VT3-VT4 tipa MP40, un tranzistora VT4 kolektors ir savienots ar izpildreleju KR tipa RSM-1.
Komandu signāla zemfrekvences spriegumu pastiprina tranzistori VT3-VT4 un caur kondensatoru C13 piegādā taisngrieža šūnai UD1, UDZ.
Rektificētais spriegums caur rezistoru R9 tiek piegādāts tranzistora VT3 pamatnei. Šajā gadījumā tranzistora VT3 emitētāja strāva strauji palielinās, tranzistors VT4 atveras. Relejs tiek aktivizēts, aizverot vadības ierīces motora barošanas ķēdi.
Komandierīce sastāv no elektromotora, sprūdrata mehānisma, programmas diska un sadales bīdāmajiem kontaktiem. Programmas disks, kura sānos ir džemperu sistēma, caur sadales bīdāmiem kontaktiem pārslēdz strāvu uz piedziņas motoriem un citiem rotaļlietas elektriskajiem elementiem.
Radiovadāmas rotaļlietas elektriskās ķēdes apraksts
Diagrammā (3. att.) parādīta viena no radiovadāmās rotaļlietas elektroiekārtu iespējām.
Rotaļlietai ir divi piedziņas motori, kas nodrošina kustību uz priekšu un griežas pa kreisi un pa labi. Rotaļlietas aizmugurējās gaismas spuldzes kalpo kā pagrieziena rādītāji. Divi priekšējie lukturi rada rotaļlietas ceļa apgaismojuma efektu.

3. att
Lai saņemtu komandu signālus no raidītāja, rotaļlietā ir iebūvēts uztvērējs un komandu ierīce. Piedziņas un vadības motoru, kā arī spuldzes darbina divi sērijveidā savienoti 3336L(U) (GB1) tipa akumulatori. Uztvērēju darbina Krona-VTs akumulators (GB2). Lai izslēgtu akumulatoru, izmantojiet divu polu slēdzi S. Kad tiek saņemts komandas signāls no raidītāja, releja KR, uztvērējs tiek aktivizēts un tā kontakti ieslēdz komandu aparāta elektromotoru (4. att.) MZ .

4. att. Komandu aparāts
MZ elektromotors, izmantojot sprūdrata mehānismu, pagriež programmas disku par 30°, kas atbilst vienas komandas pārslēgšanai.
Programmas disks, izmantojot sadales bīdāmos kontaktus, ieslēdz piedziņas motorus un rotaļlietu gaismas šādi:
Pozīcijā "uz priekšu" ir aizvērti kontakti 1, 2, 3, 4, savukārt motori M1 un M2 ir ieslēgti, kā arī spuldzes H1, H2, NC, H4.
“Labajā” pozīcijā kontakti 1, 2 ir aizvērti, savukārt M1 motors un NC lampiņa ir ieslēgti.
Pozīcijā "Stop" visi kontakti ir atvērti.
Pozīcijā “kreisais” kontakti 1, 3 ir aizvērti, savukārt M2 motors un H4 spuldze ir ieslēgti.
Komandas periodiski mainās. Diagramma parāda komandu secību vienā ciklā.
Sistēmas uzstādīšanas un nodošanas ekspluatācijā instrukcijas
Uztvērēju ieteicams rotaļlietā novietot maksimāli tālu no elektriskās sistēmas. motori un elektromagnēti. Lai aizsargātu uztvērēju no elektromotoru radītiem traucējumiem, paralēli elektromotoriem ieteicams pieslēgt 10-20 uF elektrolītiskos kondensatorus ar darba spriegumu 10-12 volti, ievērojot pieslēguma polaritāti. Uztvērējam ir jāpievieno antena. Kā antenu var izmantot tapu vai stiepli, kuras diametrs ir 1,0-2,0 mm un garums vismaz 20 cm.Antenai jābūt izolētai no rotaļlietas korpusa. Kā izolatorus var izmantot detaļas, kas izgatavotas no keramikas, fluoroplastmasas, organiskā stikla vai polistirola. Palielinoties antenas garumam, palielinās vadības diapazons. Uztvērējam jābūt pārklātam ar izolācijas materiāla vāku, lai pasargātu to no putekļiem un mitruma. Attālumam no iespiedshēmas plates līdz pamatnei, uz kuras ir uzstādīts uztvērējs, jābūt vismaz 5 mm.
Elementu izvietojums uz iespiedshēmas plates parādīts 5. att.
Pēc elektriskās ķēdes uzstādīšanas un tās funkcionalitātes pārbaudes (pārslēgšanas procedūra ir norādīta zemāk), ir nepieciešams noregulēt uztvērēju uz maksimālo jutību. Regulēšana tiek veikta, izmantojot kondensatoru C4 (sk. shēmas shēmu un uztvērēja zīmējumu). Pagriežot kondensatora rotoru ar izolācijas skrūvgriezi, jums pēc iespējas jāatrod pozīcija, kurā darbojas relejs, kad raidītājs ir noņemts.
Komandu ierīce tiek fiksēta uz horizontālas platformas, izmantojot spīles.
Radioelementu saraksts
| Apzīmējums | Tips | Denominācija | Daudzums | Piezīme | Veikals | Mans piezīmju bloks | |
|---|---|---|---|---|---|---|---|
| 1. attēls. | |||||||
| VT1 | Bipolārais tranzistors | P416 | 1 | Uz piezīmju grāmatiņu | |||
| VT2, VT3 | Bipolārais tranzistors | MP40 | 2 | Uz piezīmju grāmatiņu | |||
| C1 | Kondensators | 24 pF | 1 | Uz piezīmju grāmatiņu | |||
| C2 | Kondensators | 56 pF | 1 | Uz piezīmju grāmatiņu | |||
| C3 | Trimmera kondensators | 4-15 pF | 1 | Uz piezīmju grāmatiņu | |||
| C4, C7 | Kondensators | 3300 pF | 2 | Uz piezīmju grāmatiņu | |||
| C5 | Kondensators | 75 pF | 1 | Uz piezīmju grāmatiņu | |||
| C6 | Kondensators | 30 pF | 1 | Uz piezīmju grāmatiņu | |||
| S8, S9 | Kondensators | 0,05 µF | 2 | Uz piezīmju grāmatiņu | |||
| R1, R4, R5 | Rezistors | 22 kOhm | 3 | Uz piezīmju grāmatiņu | |||
| R2 | Rezistors | 15 kOhm | 1 | Uz piezīmju grāmatiņu | |||
| R3 | Rezistors | 75 omi | 1 | Uz piezīmju grāmatiņu | |||
| R6 | Rezistors | 3 kOhm | 1 | Uz piezīmju grāmatiņu | |||
| L1, L2 | Induktors | 2 | Uz piezīmju grāmatiņu | ||||
| S | Takts poga | 1 | Uz piezīmju grāmatiņu | ||||
| XS | Antenas savienotājs | 1 | Uz piezīmju grāmatiņu | ||||
| HT | Savienotājs Krona akumulatora pievienošanai | 1 | Uz piezīmju grāmatiņu | ||||
| G.B. | Akumulators | "Krona-VTs" 9 volti | 1 | Vai līdzīgi | Uz piezīmju grāmatiņu | ||
| 2. attēls. | |||||||
| VT1 | Bipolārais tranzistors | P416 | 1 | Uz piezīmju grāmatiņu | |||
| VT2-VT4 | Bipolārais tranzistors | MP40 | 3 | Uz piezīmju grāmatiņu | |||
| VD1, VD3 | Diode | D9V | 2 | Uz piezīmju grāmatiņu | |||
| VD2, VD4 | Diode | KD103A | 2 | Uz piezīmju grāmatiņu | |||
| C1 | Kondensators | 5,6 pF | 1 | Uz piezīmju grāmatiņu | |||
| C2, C8, C13 | Kondensators | 0,047 µF | 3 | Uz piezīmju grāmatiņu | |||
| C3, C9, C15 | 20 µF | 3 | Uz piezīmju grāmatiņu | ||||
| C4, C7 | Trimmera kondensators | 6-25 pF | 2 | Uz piezīmju grāmatiņu | |||
| C5 | Kondensators | 2200 pF | 1 | Uz piezīmju grāmatiņu | |||
| C6 | Kondensators | 24 pF | 1 | Uz piezīmju grāmatiņu | |||
| C10 | Elektrolītiskais kondensators | 5 µF | 1 | Uz piezīmju grāmatiņu | |||
| C11 | Kondensators | 5 µF | 1 | Uz piezīmju grāmatiņu | |||
| C12 | Kondensators | 1000 pF | 1 | Uz piezīmju grāmatiņu | |||
| C14 | Elektrolītiskais kondensators | 10 µF | 1 | Uz piezīmju grāmatiņu | |||
| R1 | Rezistors | 22 kOhm | 1 | Uz piezīmju grāmatiņu | |||
| R2, R4, R10 | Rezistors | 10 kOhm | 3 | Uz piezīmju grāmatiņu | |||
| R3, R7, R8 | Rezistors | 4,7 kOhm | 3 | Uz piezīmju grāmatiņu | |||
| R5, R9 | Rezistors | 6,8 kOhm | 2 | ||||
Dažādu modeļu un rotaļlietu radiovadībai var izmantot diskrētas un proporcionālas darbības iekārtas. Galvenā atšķirība starp proporcionālo un diskrēto aprīkojumu ir tāda, ka tā ļauj pēc operatora komandām novirzīt modeļa stūres jebkurā vēlamajā leņķī un vienmērīgi mainīt tā kustības ātrumu un virzienu “uz priekšu” vai “atpakaļ”. Proporcionālās darbības iekārtu uzbūve un uzstādīšana ir diezgan sarežģīta un... ne vienmēr iesācēju radioamatieru spēkos. Lai gan diskrētas darbības aprīkojumam ir ierobežotas iespējas, tās var paplašināt, izmantojot īpašus tehniskos risinājumus. Tāpēc tālāk mēs apsvērsim vienas komandas vadības aprīkojumu, kas piemērots riteņu, lidojošiem un peldošiem modeļiem.
Radiovadāmā modeļa raidītājs.
Lai kontrolētu modeļus 500 m rādiusā, kā liecina pieredze, pietiek ar raidītāju ar aptuveni 100 mW izejas jaudu. Radiovadāmo modeļu raidītāji, kā likums, darbojas diapazonā no 10 m. Modeļa vienas komandas vadība tiek veikta šādi. Kad tiek dota vadības komanda, raidītājs izstaro augstfrekvences elektromagnētiskās svārstības, proti, ģenerē vienu nesējfrekvenci.Uztvērējs, kas atrodas modelī, saņem raidītāja sūtīto signālu, kā rezultātā tiek aktivizēts izpildmehānisms. Rezultātā modelis, paklausot komandai, maina kustības virzienu vai izpilda vienu instrukciju, kas ir iepriekš iebūvēta modeļa dizainā. Izmantojot vienas komandas vadības modeli, jūs varat likt modelim veikt diezgan sarežģītas kustības. Vienas komandas raidītāja diagramma ir parādīta attēlā. 22.4. Raidītājs ietver galveno augstfrekvences oscilatoru un modulatoru. Galvenais oscilators ir samontēts uz tranzistora VT1 saskaņā ar kapacitatīvo trīspunktu ķēdi. Raidītāja L2..C2 ķēde ir noskaņota uz frekvenci 27,12 MHz, ko modeļu radio vadībai atvēlējusi Valsts telekomunikāciju uzraudzības iestāde. Ģeneratora līdzstrāvas darbības režīmu nosaka, izvēloties rezistora R1 pretestības vērtību. Ģeneratora radītās augstfrekvences svārstības izstaro kosmosā ar antenu, kas savienota ar ķēdi caur atbilstošo induktors L1. Modulators ir izgatavots uz diviem tranzistoriem VT1, VT2 un ir simetrisks multivibrators. Modulētais spriegums tiek noņemts no tranzistora VT2 kolektora slodzes R4 un tiek piegādāts augstfrekvences ģeneratora tranzistora VT1 kopējai strāvas ķēdei, kas nodrošina 100% modulāciju. Raidītāju vada ar pogu SB1, kas savienota ar vispārējo strāvas ķēdi. Galvenais oscilators nedarbojas nepārtraukti, bet tikai tad, kad tiek nospiesta poga SB1, kad parādās multivibrato ģenerētie strāvas impulsi
Rīsi. 22.4. Radiovadāmā modeļa raidītāja shematiskā diagramma
rums Galvenā oscilatora radītās augstfrekvences svārstības tiek nosūtītas uz antenu atsevišķās porcijās, kuru atkārtošanās frekvence atbilst modulatora impulsu frekvencei.
Raidītājs izmanto tranzistorus ar bāzes strāvas pārneses koeficientu vismaz 60. Rezistori ir MLT-0.125 tipa, kondensatori K10-7, KM-6. Atbilstošajai antenas spolei L1 ir 12 apgriezieni PEV-1 0,4, un tā ir uztīta uz vienota rāmja no kabatas uztvērēja ar skaņojošo ferīta serdi 100NN klases ar 2,8 mm diametru. L2 spole ir bez rāmja un satur 16 PEV-1 0,8 stieples apgriezienus, kas uztīti uz 10 mm diametra serdeņa. Kā vadības pogu var izmantot MP-7 tipa mikroslēdzi. Raidītāja daļas ir uzstādītas uz iespiedshēmas plates, kas izgatavota no folijas stiklplasta. Raidītāja antena ir elastīgas tērauda stieples gabals 0 1 ... 2 mm garumā un aptuveni 60 cm garumā, kas ir tieši savienots ar ligzdu XI, kas atrodas uz iespiedshēmas plates. Visām raidītāja daļām jābūt ievietotām alumīnija korpusā. Korpusa priekšējā panelī ir vadības poga. Vietā, kur antena iet caur korpusa sienu uz kontaktligzdu XI, jāuzstāda plastmasas izolators, lai antena nepieskartos korpusam.
Ar zināmām labām daļām un pareizu uzstādīšanu raidītājam nav nepieciešama īpaša regulēšana. Jums tikai jāpārliecinās, ka tas darbojas, un, mainot L1 spoles induktivitāti, jāsasniedz maksimālā raidītāja jauda. Lai pārbaudītu multivibratora darbību, starp VT2 kolektoru un barošanas avota plusu jāpievieno augstas pretestības austiņas. Kad poga SB1 ir aizvērta, austiņās ir dzirdama zema skaņa, kas atbilst multivibratora frekvencei. Lai pārbaudītu HF ģeneratora funkcionalitāti, ir nepieciešams salikt viļņu mērītāju saskaņā ar diagrammu attēlā. 22.5. Ķēde ir vienkāršs detektora uztvērējs, kurā spole L1 ir uztīta ar PEV-1 1 ... 1,2 vadu un satur 10 apgriezienus ar krānu no 3 apgriezieniem. Spole ir uztīta ar 4 mm soli uz plastmasas rāmja 0 25 mm. Kā indikators tiek izmantots līdzstrāvas voltmetrs ar relatīvo ieejas pretestību 
Rīsi. 22.5. Viļņu mērītāja shematiska shēma raidītāja noregulēšanai
10 kOhm/V vai mikroampermetrs strāvai 50...100 µA. Viļņmetrs ir samontēts uz nelielas plātnes, kas izgatavota no folijas stikla šķiedras lamināta 1,5 mm biezumā. Ieslēdzot raidītāju, novietojiet viļņu mērītāju 50...60 cm attālumā no tā. Kad RF ģenerators darbojas pareizi, viļņmetra adata novirzās par noteiktu leņķi no nulles atzīmes. Noskaņojot RF ģeneratoru uz 27,12 MHz frekvenci, pārbīdot un izkliedējot L2 spoles pagriezienus, tiek sasniegta voltmetra adatas maksimālā novirze. Antenas izstarotās augstfrekvences svārstību maksimālā jauda tiek iegūta, pagriežot spoles L1 serdi. Raidītāja iestatīšana tiek uzskatīta par pabeigtu, ja viļņu mērītāja voltmetrs 1 ... 1,2 m attālumā no raidītāja uzrāda vismaz 0,05 V spriegumu.
Radiovadāms modeļa uztvērējs.
Modeļa vadīšanai radioamatieri diezgan bieži izmanto uztvērējus, kas būvēti saskaņā ar superreģeneratora ķēdi. Tas ir saistīts ar to, ka superreģeneratīvajam uztvērējam ar vienkāršu dizainu ir ļoti augsta jutība, aptuveni 10...20 µV. Modeļa superreģeneratīvā uztvērēja diagramma ir parādīta attēlā. 22.6. Uztvērējs ir samontēts uz trim tranzistoriem, un to darbina Krona baterija vai cits 9V avots. Uztvērēja pirmais posms ir superreģeneratīvs detektors ar pašatdzišanu, kas izgatavots uz tranzistora VT1. Ja antena nesaņem signālu, tad šī kaskāde ģenerē augstfrekvences svārstību impulsus, kas seko ar frekvenci 60...100 kHz. Šī ir izslēgšanas frekvence, ko iestata kondensators C6 un rezistors R3. Stiprinot tevi - 
Rīsi. 22.6. Superreģeneratīvā radiovadāmā uztvērēja shematiskā diagramma
Komandas signāla sadalīšana ar uztvērēja superreģeneratīvo detektoru notiek šādi. Tranzistors VT1 ir savienots saskaņā ar kopēju bāzes ķēdi, un tā kolektora strāva pulsē ar dzēšanas frekvenci. Ja uztvērēja ieejā nav signāla, šie impulsi tiek atklāti un rada zināmu spriegumu rezistoram R3. Brīdī, kad signāls nonāk uztvērējā, atsevišķu impulsu ilgums palielinās, kā rezultātā palielinās spriegums uz rezistora R3. Uztvērējam ir viena ieejas ķēde LI, C4, kas ir noregulēta uz raidītāja frekvenci, izmantojot spoles serdi L1. Savienojums starp ķēdi un antenu ir kapacitatīvs. Uztvērēja saņemtais vadības signāls tiek piešķirts rezistoram R4. Šis signāls ir 10...30 reizes mazāks par izslēgšanas frekvences spriegumu. Lai nomāktu traucējošo spriegumu ar dzēšanas frekvenci, starp superreģeneratīvo detektoru un sprieguma pastiprinātāju ir iekļauts filtrs L3, C7. Šajā gadījumā pie filtra izejas izslēgšanās frekvences spriegums ir 5...10 reizes mazāks par lietderīgā signāla amplitūdu. Atklātais signāls tiek padots caur atdalošo kondensatoru C8 uz tranzistora VT2 pamatni, kas ir zemfrekvences pastiprināšanas pakāpe, un pēc tam uz elektronisko releju, kas samontēts uz tranzistora VT3 un diodēm VD1, VD2. Tranzistora VT3 pastiprinātais signāls tiek iztaisnots ar diodēm VD1 un VD2. Rektificētā strāva (negatīvā polaritāte) tiek piegādāta tranzistora VT3 pamatnei. Kad elektroniskā releja ieejā parādās strāva, tranzistora kolektora strāva palielinās un tiek aktivizēts relejs K1. Par uztvērēja antenu var izmantot tapu 70...100 cm garumā.Superreģeneratīvā uztvērēja maksimālo jutību iestata, izvēloties rezistora R1 pretestību.
Uztvērējs tiek montēts ar drukātu metodi uz plātnes, kas izgatavota no folijas stikla šķiedras lamināta ar biezumu 1,5 mm un izmēriem 100x65 mm. Uztvērējs izmanto tādus pašus rezistorus un kondensatorus kā raidītājs. Superreģeneratora ķēdes spolei L1 ir 8 pagriezieni no PELSHO 0,35 stieples, uztīta kārta, lai ieslēgtu polistirola rāmi 0 6,5 mm, ar 100NN klases regulējošo ferīta serdi ar diametru 2,7 mm un garumu 8 mm. Droselēm ir induktivitāte: L2 - 8 µH, un L3 - 0,07...0,1 µH. Elektromagnētiskais relejs K1 tips RES-6 ar tinuma pretestību 200 omi. Uztvērēja noregulēšana sākas ar superreģeneratīvu kaskādi. Pievienojiet augstas pretestības austiņas paralēli kondensatoram C7 un ieslēdziet barošanu. Troksnis, kas parādās austiņās, norāda, ka superreģeneratīvais detektors darbojas pareizi. Mainot rezistora R1 pretestību, tiek sasniegts maksimālais troksnis austiņās. Sprieguma pastiprināšanas kaskādei uz tranzistora VT2 un elektroniskajam relejam nav nepieciešama īpaša regulēšana. Izvēloties rezistora R7 pretestību, tiek sasniegta uztvērēja jutība aptuveni 20 μV. Uztvērēja galīgā iestatīšana notiek kopā ar raidītāju.Ja paralēli pieslēdzat austiņas releja K1 spolei un ieslēdzat raidītāju, tad austiņās jādzird skaļš troksnis. Noskaņojot uztvērēju uz raidītāja frekvenci, austiņās pazūd troksnis un darbojas relejs.



